大模型从0到1|第十七课:手把手讲解GRPO¶
上一讲:基于可验证奖励的强化学习概览 (Policy Gradient)
本讲:深入探讨策略梯度的机制(例如:GRPO)
1. 语言模型的强化学习设置 (RL Setup for Language Models)¶
状态 (State) s:提示词 (prompt) + 截至目前生成的回复 动作 (Action) a:生成下一个 token
奖励 (Rewards) R:回复有多好;我们将关注: * 结果奖励 (Outcome rewards):取决于整个回复 * 可验证奖励 (Verifiable rewards):其计算是确定性的 * 折扣 (Discounting) 和自举 (Bootstrapping) 的概念不太适用 * 示例:“... Therefore, the answer is 3 miles.”
转移概率 (Transition probabilities) T(s' | s, a):确定性的 s' = s + a * 可以进行规划 / 测试时计算 (test-time compute)(与机器人技术不同) * 状态实际上是构造出来的(与机器人技术不同),因此有很多灵活性
策略 (Policy) π(a | s):就是一个语言模型(经过微调的)
Rollout/episode/trajectory:s → a → ... → a → a → R
目标 (Objective):最大化期望奖励 E[R] (其中期望是针对提示词 s 和回复 token a 取的)
2. 策略梯度 (Policy Gradient)¶
为了符号简单起见,让 a 表示整个回复。
我们希望最大化关于策略 π 的期望奖励: E[R] = ∫ p(s) π(a | s) R(s, a)
显而易见的方法是求梯度: ∇ E[R] = ∫ p(s) ∇ π(a | s) R(s, a) ∇ E[R] = ∫ p(s) π(a | s) ∇ log π(a | s) R(s, a) ∇ E[R] = E[∇ log π(a | s) R(s, a)]
朴素策略梯度 (Naive policy gradient): * 采样提示词 s,采样回复 a ~ π(a | s) * 基于 ∇ log π(a | s) R(s, a) 更新参数(与 SFT 相同,但由 R(s, a) 加权)
设置: R(s, a) ∈ {0, 1} = 回复是否正确 * 朴素策略梯度仅在正确回复上更新 * 像 SFT,但数据集随策略变化而随时间变化
挑战:高噪声/方差 在这个设置中,稀疏奖励(很少有回复得到奖励 1,大多数得到 0) 对比:在 RLHF 中,奖励模型(从成对偏好中学习)更加连续
基线 (Baselines)¶
回忆 ∇ E[R] = E[∇ log π(a | s) R(s, a)] ∇ log π(a | s) R(s, a) 是 ∇ E[R] 的无偏估计,但也许还有其他方差更低的估计...
示例:两个状态 * s1: a1 → 奖励 11, a2 → 奖励 9 * s2: a1 → 奖励 0, a2 → 奖励 2 不希望 s1 → a2(奖励 9),因为 a1 更好;希望 s2 → a2(奖励 2),但是 9 > 2。
想法: 最大化基线奖励:E[R - b(s)] 这只是 E[R] 平移了一个不依赖于策略 π 的常数 E[b(s)] 我们基于 ∇ log π(a | s) (R(s, a) - b(s)) 更新
应该使用什么 b(s)?
示例:两个状态 假设在 (s, a) 上均匀分布且 |∇ π(a | s)| = 1 朴素方差 = std([11, 9, 0, 2]) = 5.26 定义基线 b(s1) = 10, b(s2) = 1 基线方差 = std([11-10, 9-10, 0-1, 2-1]) = std([1, -1, -1, 1]) = 1.15 方差显著降低!
最优 b*(s) = E[(∇ π(a | s))^2 R | s] / E[(∇ π(a | s))^2 | s](对于单参数模型) 这很难计算... ...所以启发式方法是使用平均奖励: b(s) = E[R | s] 这仍然很难计算,必须进行估计。
优势函数 (Advantage functions)¶
这种 b(s) 的选择与优势函数有关。 * V(s) = E[R | s] = 从状态 s 开始的期望奖励 * Q(s, a) = E[R | s, a] = 从状态 s 采取动作 a 的期望奖励 (注意:这里 Q 和 R 是相同的,因为我们假设 a 包含所有动作且我们要么有结果奖励。)
定义 (优势): A(s, a) = Q(s, a) - V(s) 直觉:动作 a 比从状态 s 预期的好多少
如果 b(s) = E[R | s],那么基线奖励与优势完全相同! E[R - b(s)] = A(s, a)
一般来说: * 理想情况:E[∇ log π(a | s) R(s, a)] * 估计:∇ log π(a | s) δ δ 有多种选择,我们稍后会看到。
3. 实战演练 (Training walkthrough)¶
Group Relative Policy Optimization (GRPO) Link * 对 PPO 的简化,移除了 critic(价值函数) * 利用 LM 设置中的组结构(每个提示词多个回复),这提供了一个自然的基线 b(s)。
简单任务 (Simple task)¶
任务:排序 n 个数字
提示词:n 个数字
回复:n 个数字奖励应该捕捉回复与排序后的接近程度。
定义一个奖励,返回回复与真实值匹配的位置数:
def sort_distance_reward(prompt: list[int], response: list[int]) -> float:
"""
Return how close response is to ground_truth = sorted(prompt).
In particular, compute number of positions where the response matches the ground truth.
"""
assert len(prompt) == len(response)
ground_truth = sorted(prompt)
return sum(1 for x, y in zip(response, ground_truth) if x == y)
# sort_distance_reward([3, 1, 0, 2], [0, 1, 2, 3]) -> 4 (全对)
# sort_distance_reward([3, 1, 0, 2], [0, 3, 1, 2]) -> 1 (只有 0 在对的位置)
定义一个替代奖励,给予更多部分分:
def sort_inclusion_ordering_reward(prompt: list[int], response: list[int]) -> float:
"""
Return how close response is to ground_truth = sorted(prompt).
"""
assert len(prompt) == len(response)
# 为回复中出现的每个提示词中的 token 给 1 分
inclusion_reward = sum(1 for x in prompt if x in response)
# 为回复中每个排序正确的相邻对给 1 分
ordering_reward = sum(1 for x, y in zip(response, response[1:]) if x <= y)
return inclusion_reward + ordering_reward
# sort_inclusion_ordering_reward([3, 1, 0, 2], [0, 3, 1, 2]) -> 4 (包含) + 2 (0<3, 1<2) = 6
简单模型 (Simple model)¶
定义一个简单的模型,将提示词映射到回复 * 假设固定的提示词和回复长度 * 使用单独的每位置参数捕捉位置信息 * 独立解码回复中的每个位置(非自回归)
class Model(nn.Module):
def __init__(self, vocab_size: int, embedding_dim: int, prompt_length: int, response_length: int):
super().__init__()
self.embedding_dim = embedding_dim
self.embedding = nn.Embedding(vocab_size, embedding_dim)
# For each position, we have a matrix for encoding and a matrix for decoding
self.encode_weights = nn.Parameter(torch.randn(prompt_length, embedding_dim, embedding_dim) / math.sqrt(embedding_dim))
self.decode_weights = nn.Parameter(torch.randn(response_length, embedding_dim, embedding_dim) / math.sqrt(embedding_dim))
def forward(self, prompts: torch.Tensor) -> torch.Tensor:
"""
Args:
prompts: int[batch pos]
Returns:
logits: float[batch pos vocab]
"""
# Embed the prompts
embeddings = self.embedding(prompts) # [batch pos dim]
# Transform using per prompt position matrix, collapse into one vector
encoded = einsum(embeddings, self.encode_weights, "batch pos dim1, pos dim1 dim2 -> batch dim2")
# Turn into one vector per response position
decoded = einsum(encoded, self.decode_weights, "batch dim2, pos dim2 dim1 -> batch pos dim1")
# Convert to logits (input and output share embeddings)
logits = einsum(decoded, self.embedding.weight, "batch pos dim1, vocab dim1 -> batch pos vocab")
return logits
GRPO 算法流程详解¶
让我们通过详细的代码来看看 GRPO 算法的每一步:
-
从提示词 s 开始
-
生成回复 a 我们对于一个提示词需要采样多个回复 (group)。
def generate_responses(prompts: torch.Tensor, model: Model, num_responses: int) -> torch.Tensor: logits = model(prompts) # [batch pos vocab] batch_size = prompts.shape[0] # Sample num_responses (independently) for each [batch pos] flattened_logits = rearrange(logits, "batch pos vocab -> (batch pos) vocab") flattened_responses = torch.multinomial(softmax(flattened_logits, dim=-1), num_samples=num_responses, replacement=True) # [batch pos trial] responses = rearrange(flattened_responses, "(batch pos) trial -> batch trial pos", batch=batch_size) return responses responses = generate_responses(prompts=prompts, model=model, num_responses=5) -
计算这些回复的奖励 R
-
给定奖励 R 计算 deltas δ(用于执行更新): 这里是 GRPO 核心创新的地方:如何计算 advantage (delta)。
def compute_deltas(rewards: torch.Tensor, mode: str) -> torch.Tensor: if mode == "rewards": return rewards if mode == "centered_rewards": # Compute mean over all the responses (trial) for each prompt (batch) mean_rewards = rewards.mean(dim=-1, keepdim=True) centered_rewards = rewards - mean_rewards return centered_rewards if mode == "normalized_rewards": mean_rewards = rewards.mean(dim=-1, keepdim=True) std_rewards = rewards.std(dim=-1, keepdim=True) centered_rewards = rewards - mean_rewards normalized_rewards = centered_rewards / (std_rewards + 1e-5) return normalized_rewards if mode == "max_rewards": # Zero out any reward that isn't the maximum for each batch max_rewards = rewards.max(dim=-1, keepdim=True)[0] max_rewards = torch.where(rewards == max_rewards, rewards, torch.zeros_like(rewards)) return max_rewards raise ValueError(f"Unknown mode: {mode}") -
计算这些回复的对数概率 我们需要计算模型在这些回复上的 log probability。
重要:冻结参数注意事项。 在优化时,重要的是冻结并不对def compute_log_probs(prompts: torch.Tensor, responses: torch.Tensor, model: Model) -> torch.Tensor: # Compute log prob of responses under model logits = model(prompts) # [batch pos vocab] log_probs = F.log_softmax(logits, dim=-1) # [batch pos vocab] # Replicate to align with responses num_responses = responses.shape[1] log_probs = repeat(log_probs, "batch pos vocab -> batch trial pos vocab", trial=num_responses) # Index into log_probs using responses log_probs = log_probs.gather(dim=-1, index=responses.unsqueeze(-1)).squeeze(-1) # [batch trial pos] return log_probs log_probs = compute_log_probs(prompts=prompts, responses=responses, model=model)p_old进行微分。 -
计算损失以更新模型参数 我们有多种计算损失的方式:
- Naive: 直接使用 log_probs * deltas
- Unclipped: 引入重要性采样比率 ratios
- Clipped (PPO style): 截断比率以保证更新幅度受控
def compute_loss(log_probs: torch.Tensor, deltas: torch.Tensor, mode: str, old_log_probs: torch.Tensor | None = None) -> torch.Tensor: if mode == "naive": return -einsum(log_probs, deltas, "batch trial pos, batch trial -> batch trial pos").mean() if mode == "unclipped": ratios = log_probs / old_log_probs # [batch trial] return -einsum(ratios, deltas, "batch trial pos, batch trial -> batch trial pos").mean() if mode == "clipped": epsilon = 0.01 unclipped_ratios = log_probs / old_log_probs # [batch trial] unclipped = einsum(unclipped_ratios, deltas, "batch trial pos, batch trial -> batch trial pos") clipped_ratios = torch.clamp(unclipped_ratios, min=1 - epsilon, max=1 + epsilon) clipped = einsum(clipped_ratios, deltas, "batch trial pos, batch trial -> batch trial pos") return -torch.minimum(unclipped, clipped).mean() raise ValueError(f"Unknown mode: {mode}") -
KL 惩罚 (KL penalty) 有时,我们可以使用显式的 KL 惩罚来正则化模型。 如果你想让 RL 为模型增加新能力,但不希望它忘记原有能力,这很有用。
def compute_kl_penalty(log_probs: torch.Tensor, ref_log_probs: torch.Tensor) -> torch.Tensor: """ Compute an estimate of KL(model | ref_model) Scale using estimate: KL(p || q) = E_p[q/p - log(q/p) - 1] """ return (torch.exp(ref_log_probs - log_probs) - (ref_log_probs - log_probs) - 1).sum(dim=-1).mean()
实验 (Experiments)¶
1. 基于原始奖励 (Raw Rewards) 更新
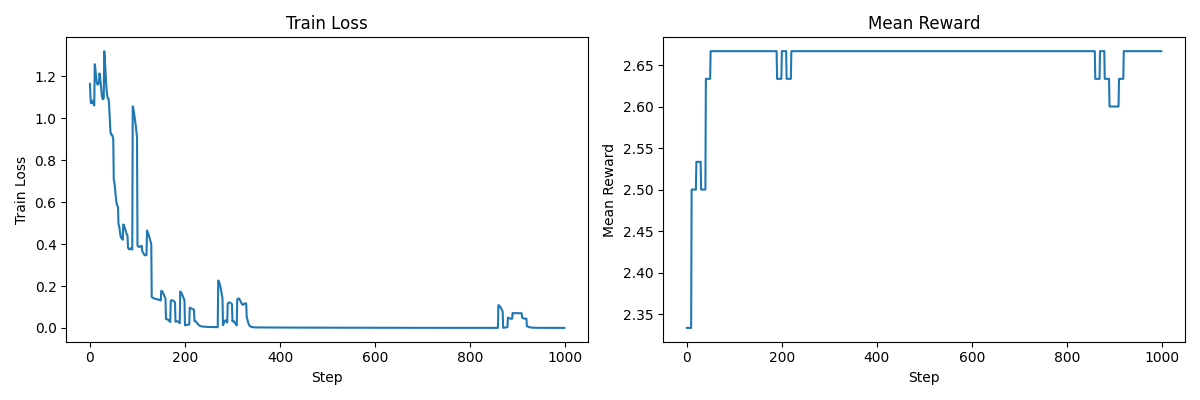 通过查看输出,你会发现到最后,我们并没有真正学好排序(而且这还是训练集)。
通过查看输出,你会发现到最后,我们并没有真正学好排序(而且这还是训练集)。
2. 使用中心化奖励 (Centered Rewards)
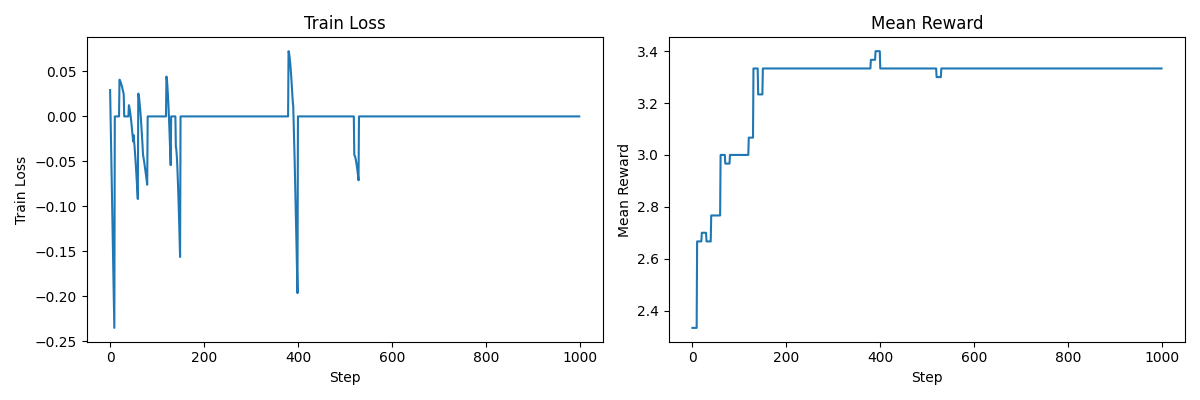 这似乎有所帮助,因为:
* 次优奖励会得到负梯度更新
* 如果给定提示词的所有回复都具有相同的奖励,则我们不更新。
总体而言,这更好,但我们仍然陷入局部最优。
这似乎有所帮助,因为:
* 次优奖励会得到负梯度更新
* 如果给定提示词的所有回复都具有相同的奖励,则我们不更新。
总体而言,这更好,但我们仍然陷入局部最优。
3. 使用标准差归一化 (Normalized Rewards)
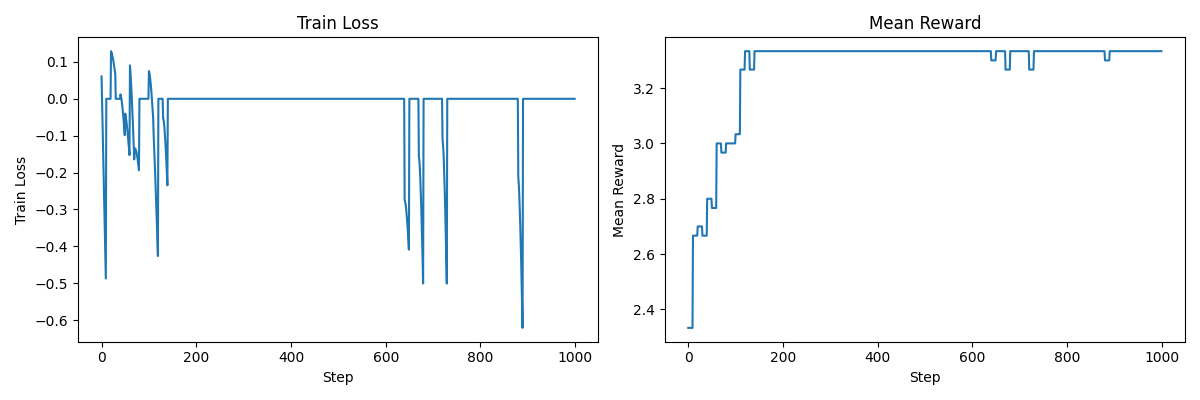 这里差别不大,实际上,像 Dr. GRPO 这样的变体不执行这种归一化以避免长度偏差(这里不是问题,因为所有回复长度相同)。Link
这里差别不大,实际上,像 Dr. GRPO 这样的变体不执行这种归一化以避免长度偏差(这里不是问题,因为所有回复长度相同)。Link
总的来说,正如你所见,强化学习并非易事,很容易陷入次优状态。 超参数可能需要更好的调整...
4. 总结 (Summary)¶
- 强化学习是超越人类能力的关键
- 如果你能衡量它,你就能优化它
- 策略梯度框架概念清晰,只需要基线来减少方差
- RL 系统比预训练复杂得多(推理工作负载,管理多个模型)
接下来的两讲: * Junyang Lin (Qwen) Link * Mike Lewis (Llama) Link