大模型从0到1|第六讲:手写高性能算子
大模型从0到1|第六讲:手写高性能算子
课程链接:Stanford CS336 Spring 2025 - Lecture 6: Writing Fast Kernels
课程概述
上节课回顾: GPU 的高层次概述和性能分析
本节课重点: 性能测试/分析 + 手写 GPU 算子
核心内容:
- Benchmarking 和 Profiling 技术
- Kernel Fusion(算子融合)的动机
- 三种编写算子的方式:CUDA、Triton、PyTorch 编译
Part 1: GPU 架构回顾
1.1 硬件架构
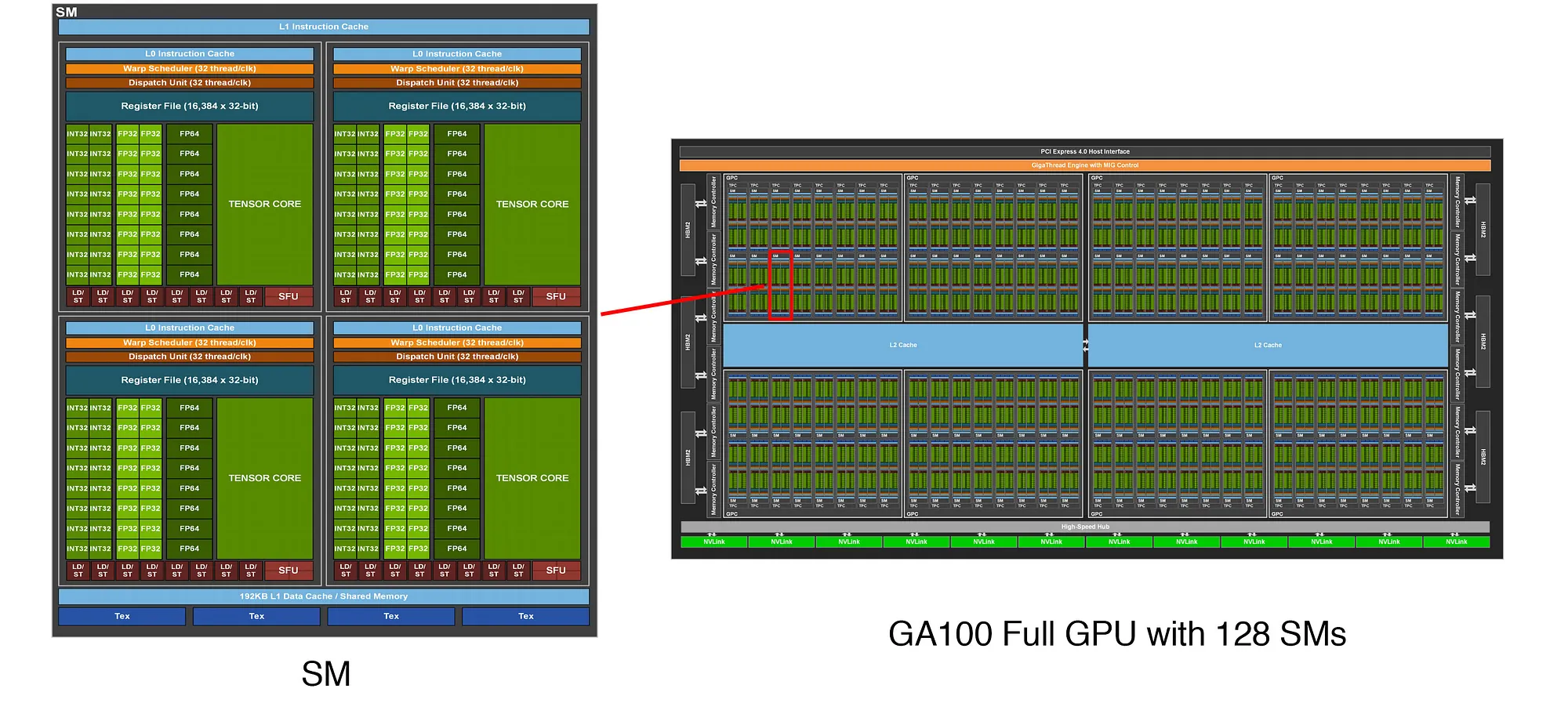
计算单元:
- Streaming Multiprocessors (SMs) [A100: 108个]
内存层次:
- DRAM [A100: 80GB] - 容量大,速度慢
- L2 Cache [A100: 40MB]
- L1 Cache [A100: 192KB per SM] - 容量小,速度快
1.2 执行模型
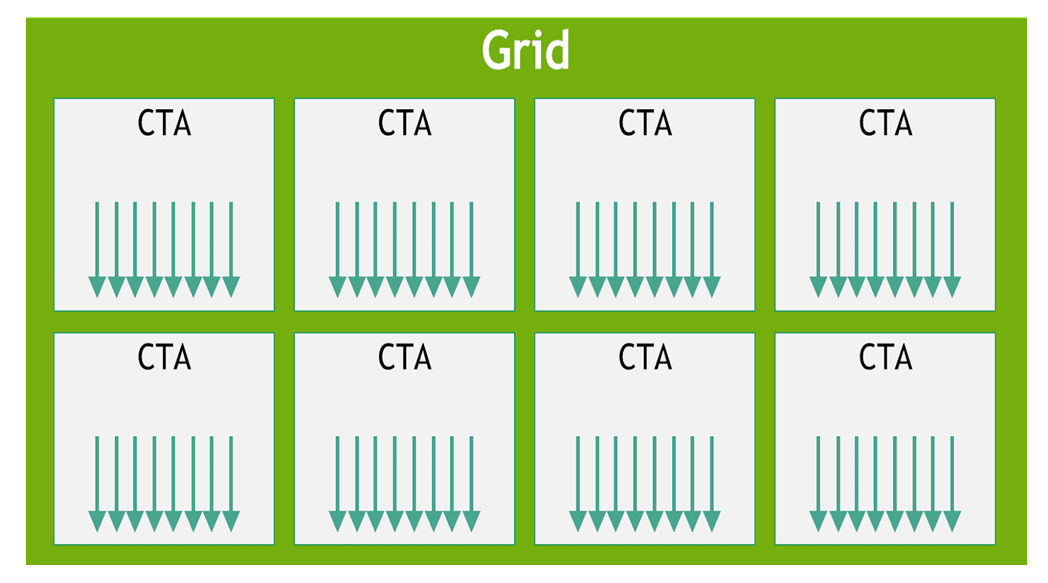
三层结构:
- Thread(线程): 处理单个索引 i,即执行 f(i)
- Thread Block(线程块): 调度到单个 SM 上,又称 CTA (Concurrent Thread Arrays)
- Grid(网格): 线程块的集合
为什么需要 Thread Block?
- 共享内存(Shared Memory): 线程块内的线程可以共享内存(速度与 L1 Cache 相当)[A100: 164KB]
- 同步机制: 可以在块内同步线程(但不能跨块同步)
- 设计原则: 将读取相似数据的 f(i) 分组到一起
1.3 硬件与执行的交互

Wave Quantization 问题:
- 线程块以”波次”调度到 SM 上
- 最后一波可能线程块较少,导致部分 SM 空闲(低占用率)
- 解决方案: 让线程块数量能被 SM 数量整除
- 经验法则: 线程块数量应 >= 4x SM 数量
挑战: 硬件的某些方面对执行模型是隐藏的(如调度策略、SM 数量)
1.4 算术强度 (Arithmetic Intensity)
定义: 算术强度 = FLOPs 数量 / 字节数
- 高算术强度: 计算密集型(compute-bound)✅ 好
- 低算术强度: 内存密集型(memory-bound)❌ 差
通用规则:
- 矩阵乘法:计算密集型
- 其他大部分操作:内存密集型
Part 2: Benchmarking 和 Profiling
2.1 为什么需要性能测试?
重要性: 必须对代码进行 benchmark 和 profile!
虽然可以阅读规格表和论文,但性能取决于:
- 库版本
- 硬件配置
- 工作负载特性
没有替代品: 必须亲自测试你的代码
2.2 示例:MLP 模型
1 | |
2.3 Benchmarking:测量时间
目的: 测量操作的实际运行时间
用途:
- 比较不同实现(哪个更快?)
- 理解性能如何扩展(如随维度变化)
实现要点:
1 | |
测试场景:
- 扩展步数(num_steps)
- 扩展层数(num_layers)
- 扩展批大小(batch_size)
- 扩展维度(dim)
注意: 由于 CUDA kernel 的非均质性、硬件等因素,时间并不总是可预测的
2.4 Profiling:分析瓶颈
目的: 了解时间花在哪里
深层价值: 帮助理解底层调用了什么
PyTorch Profiler:
1 | |
观察结果:
- 可以看到实际调用的 CUDA kernel
- 不同的 tensor 维度会调用不同的 CUDA kernel
- Kernel 名称透露实现信息
- 例如:
cutlass_80_simt_sgemm_256x128_8x4_nn_align1 - cutlass: NVIDIA 的线性代数 CUDA 库
- 256x128: tile 大小
- 例如:
Flame Graph: 可视化堆栈跟踪,显示时间分布
Part 3: Kernel Fusion 动机
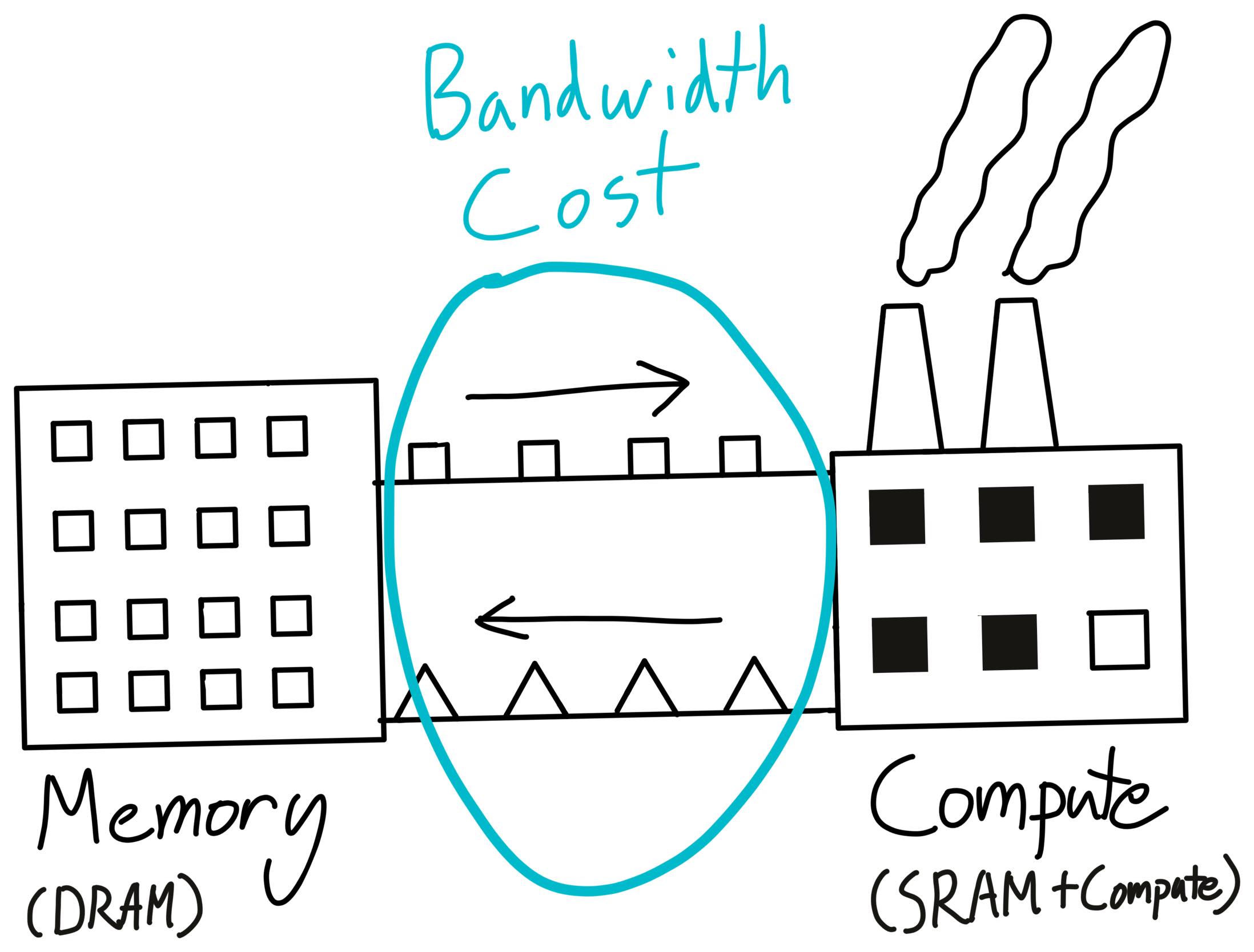
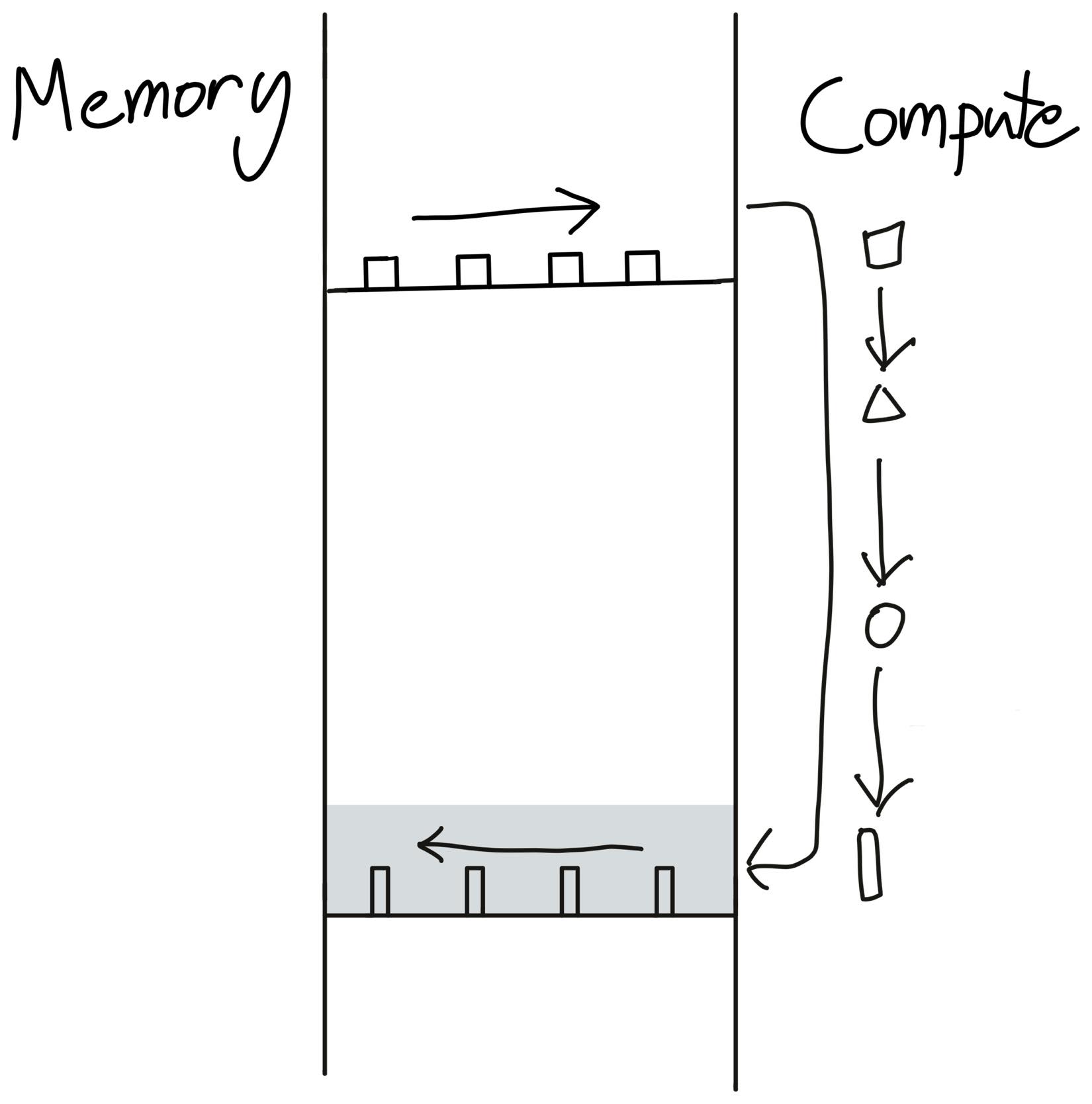
3.1 仓库与工厂的类比
类比:
- 仓库 ≈ DRAM (HBM)
- 工厂 ≈ SRAM (L1 Cache / Shared Memory)
深入理解这个类比
现实世界的工厂运作:
想象你经营一家制造工厂:
- 仓库(Warehouse): 远离工厂,容量巨大,但运输慢且昂贵
- 工厂车间(Factory Floor): 空间有限,但工人可以快速拿取材料并加工
最优策略:
- 一次性从仓库运来一批原材料
- 在工厂车间内完成所有加工步骤
- 一次性把成品运回仓库
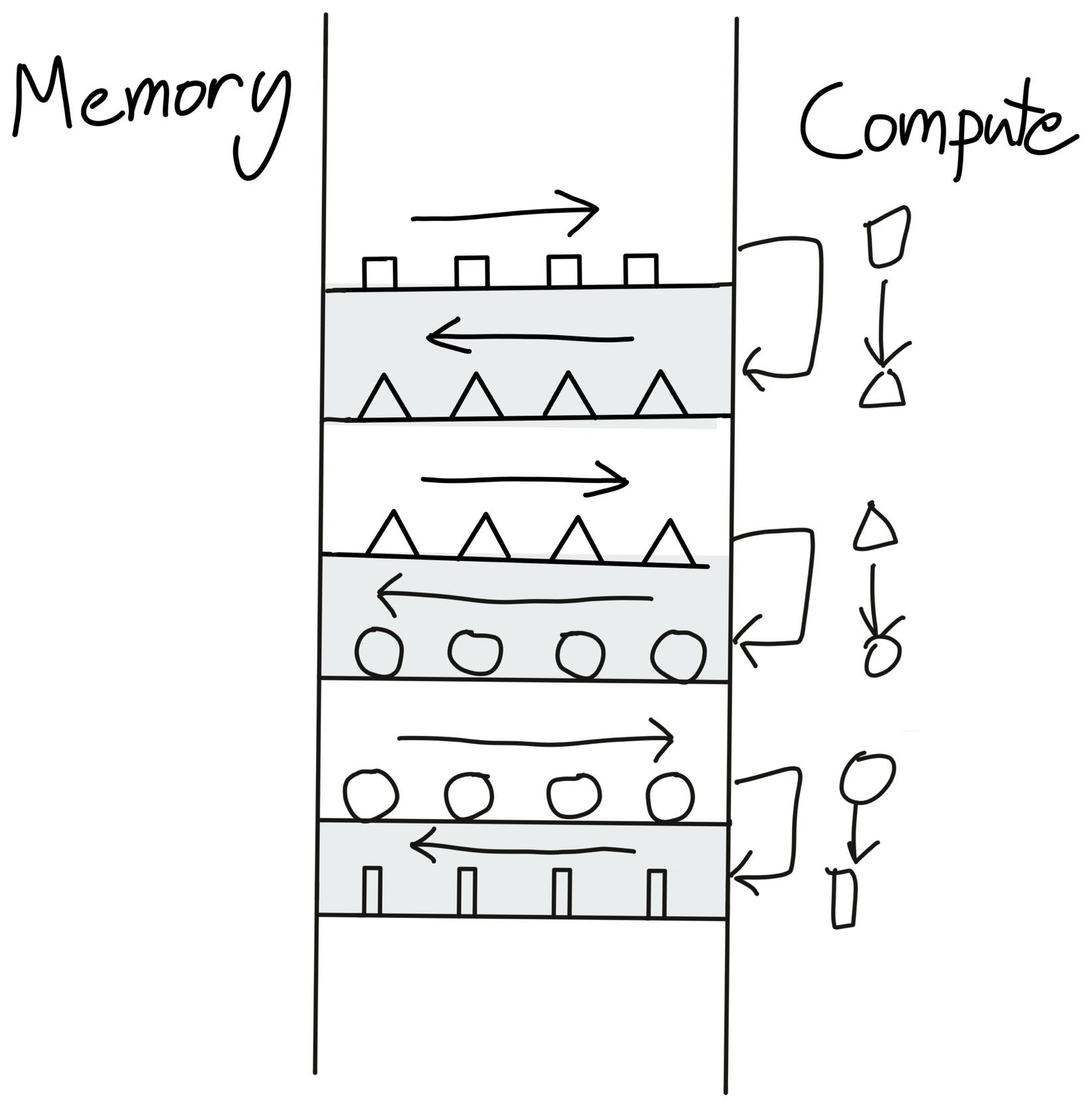
最差策略:
- 从仓库拿原材料 → 加工一步 → 送回仓库
- 再从仓库拿 → 加工第二步 → 送回仓库
- 重复多次…
每次往返仓库都是巨大的时间浪费!
映射到 GPU 内存:
| 现实世界 | GPU 硬件 | 特性 |
|---|---|---|
| 仓库 | DRAM/HBM | 容量大(40-80GB),带宽低(~2 TB/s) |
| 运输卡车 | 内存总线 | 带宽有限,往返成本高 |
| 工厂车间 | SRAM (L1/Shared Memory) | 容量小( |
| 工人 | 计算单元 (CUDA Cores) | 执行实际计算 |
关键数字对比(A100 GPU):
- DRAM 带宽: ~2 TB/s(慢 10 倍)
- SRAM 带宽: ~19 TB/s(快 10 倍)
- 容量差异: DRAM 是 SRAM 的 ~400,000 倍
未融合操作的问题
场景: 计算 output = gelu(x + bias)
未融合的执行流程:
1 | |
内存访问次数:
- 读取:3 次(x, bias, temp)
- 写入:2 次(temp, output)
- 总计:5 次 DRAM 访问 🐌
类比: 就像从仓库拿材料 → 加工一步 → 送回仓库 → 再拿出来 → 加工第二步 → 送回仓库
融合操作的优势
融合后的执行流程:
1 | |
内存访问次数:
- 读取:2 次(x, bias)
- 写入:1 次(output)
- 总计:3 次 DRAM 访问 ⚡
性能提升: 5 → 3,减少了 40% 的内存访问!
类比: 一次性从仓库拿所有材料 → 在工厂内完成所有加工 → 一次性送回成品
为什么内存访问是瓶颈?
计算速度 vs 内存速度的差距:
假设处理 1M 个元素(4MB 数据):
计算时间(在 SRAM 中):
- 加法:~0.001 ms
- GeLU:~0.01 ms
- 总计:可以忽略不计
内存传输时间(DRAM ↔ SRAM):
- 未融合:5 次 × 4MB ÷ 2TB/s = 0.01 ms
- 融合:3 次 × 4MB ÷ 2TB/s = 0.006 ms
结论: 内存传输时间 >> 计算时间!
这就是为什么说大多数操作是 memory-bound(内存受限) 而不是 compute-bound(计算受限)。
实际性能数据
GeLU 性能对比(dim=16384):
1 | |
融合带来 5-8 倍性能提升!
扩展到更复杂的场景
Transformer 中的典型操作链:
1 | |
性能提升: 可达 4-10 倍!
关键洞察总结
- DRAM 是瓶颈: 不是计算慢,是数据搬运慢
- SRAM 是宝贵资源: 容量小但速度快,要充分利用
- 最小化往返次数: 每次 DRAM 访问都是昂贵的
- 在 SRAM 中完成尽可能多的工作: 这就是 kernel fusion 的本质
记住: GPU 编程的核心不是”让计算更快”,而是”让数据搬运更少”!
这就是为什么 FlashAttention、Fused LayerNorm 等优化如此重要——它们都在减少内存往返次数。
3.2 未融合 vs 融合
未融合操作: 每个操作都需要 读取 → 计算 → 写入
融合操作: 只需要读写一次
3.3 案例:GeLU 激活函数
GeLU 公式:
1 | |
两种实现方式:
Manual GeLU(未融合):
1
2
3
4
5def manual_gelu(x):
return 0.5 * x * (1 + torch.tanh(
torch.sqrt(torch.tensor(2.0 / torch.pi)) *
(x + 0.044715 * torch.pow(x, 3))
))PyTorch GeLU(融合):
1
2def pytorch_gelu(x):
return torch.nn.functional.gelu(x)
性能对比:
- 融合版本显著更快
- Manual 版本调用多个 kernel
- PyTorch 版本只调用一个 kernel
关键洞察: 记住仓库/工厂的类比!
Part 4: CUDA Kernels
4.1 CUDA 基础
CUDA 是什么?
- C/C++ 的扩展,带有管理 GPU 的 API
- 简化模型:编写 f(i),CUDA kernel 为所有 i 计算 f(i)
编程模型:
- Grid: 线程块集合,如 numBlocks = (2, 4), blockDim = (1, 8)
- Thread Block: 线程集合,如 blockIdx = (0, 1)
- Thread: 单个操作单元,如 threadIdx = (0, 3)
编程方式:
- 编写单个线程执行的代码
- 使用 (blockIdx, blockDim, threadIdx) 确定要做什么
4.2 CUDA GeLU 实现
CUDA 代码示例(gelu.cu):
1 | |
编译和使用:
1 | |
性能:
- CUDA 实现比 manual 快
- 但不如 PyTorch 实现
局限性:
- 逐元素操作在 CUDA 中容易实现
- 但大多数有趣的操作(matmul、softmax、RMSNorm)需要读取多个值
- 需要考虑共享内存管理等
Part 5: Triton Kernels
5.1 Triton 简介
开发者: OpenAI (2021)
目标: 让 GPU 编程更易用
优势:
- 用 Python 编写
- 思考线程块而非单个线程
Triton vs CUDA:
1 | |
关键点: 编译器做更多工作,实际上可以超越 PyTorch 实现!
5.2 Triton GeLU 实现
1 | |
调试优势: 可以单步调试 Python 代码!
5.3 PTX 汇编
PTX (Parallel Thread Execution): GPU 的类汇编语言
可以查看 Triton 生成的 PTX 代码:
ld.global.*和st.global.*:从全局内存读写%ctaid.x:块索引,%tid.x:线程索引%f*:浮点寄存器,%r*:整数寄存器- Thread Coarsening: 一个线程同时处理 8 个元素
性能对比:
- Triton 实现几乎与 PyTorch 一样好
- 实际上比我们的朴素 CUDA 实现慢
- 但都远快于 manual 实现
原因:
- Triton 操作块,CUDA 操作线程
- 块允许 Triton 编译器进行其他优化(如线程粗化)
Part 6: PyTorch 编译
6.1 torch.compile
第五种方式: 用 Python 编写,编译成 Triton
1 | |
优势:
- 自动融合操作
- 无需手写 CUDA 或 Triton
- 性能接近手写实现
检查正确性:
1 | |
性能: 与 Triton 手写版本相当
Part 7: Softmax 案例研究
7.1 Softmax 操作
定义: 对矩阵的每一行进行归一化
1 | |
用途:
- Attention 机制
- 生成概率分布
7.2 Manual Softmax(未融合)
1 | |
问题: 多次读写内存
7.3 Triton Softmax(融合)
1 | |
关键优化:
- 每个线程块处理一行
- 所有操作在共享内存中完成
- 只读写一次全局内存
7.4 性能对比
1 | |
结果:
- 融合版本显著快于未融合版本
- Triton 和 torch.compile 性能接近 PyTorch
总结
核心概念
编程模型与硬件的差距 → 性能之谜
- PyTorch、Triton、PTX 与实际硬件之间存在抽象层
Benchmarking → 理解扩展性
- 测量不同配置下的性能
Profiling → 理解内部机制
- 了解 PyTorch 函数的底层实现(最终是 kernel)
PTX 汇编 → 理解 CUDA kernel 内部
- 查看实际生成的指令
五种编写函数的方式
- Manual(手动): 用 PyTorch 操作组合
- PyTorch: 使用内置函数
- Compiled: torch.compile 自动优化
- CUDA: 手写 C++/CUDA 代码
- Triton: 用 Python 编写 GPU kernel
示例操作:
- GeLU(逐元素)
- Softmax(按行)
- Matmul(复杂聚合)
关键原则
核心原则: 组织计算以最小化读写
关键思想:
- Kernel Fusion(算子融合): 仓库/工厂类比
- Tiling(分块): 使用共享内存
未来展望:
- 自动编译器(Triton、torch.compile)会越来越好
- 但理解底层原理仍然重要
延伸阅读
- Horace He’s Blog: Making Deep Learning Go Brrrr
- PyTorch Profiler Tutorial
- Triton Documentation
- CUDA MODE Community
- NVIDIA PTX ISA
- PyTorch Benchmarking
实践建议
- 每次修改后都要 benchmark/profile!
- 从简单实现开始,逐步优化
- 使用 profiler 找出瓶颈
- 理解内存访问模式
- 考虑算子融合机会
- 设置
CUDA_LAUNCH_BLOCKING=1以便调试 - 设置
TRITON_INTERPRET=0以获得最佳性能