大模型从0到1|第八讲:手撕大模型并行训练
课程链接:Stanford CS336 Spring 2025 - Lecture 8: Distributed Training Implementation
课程概述 上周回顾: 单个 GPU 内的并行化本周重点: 多 GPU 跨节点的并行化
统一主题: 在两种情况下,计算单元 (算术逻辑单元)都远离数据 (输入/输出)
核心思想: 编排计算以避免数据传输瓶颈
上周: 通过融合/分块减少内存访问本周: 通过复制/分片减少跨 GPU/节点的通信
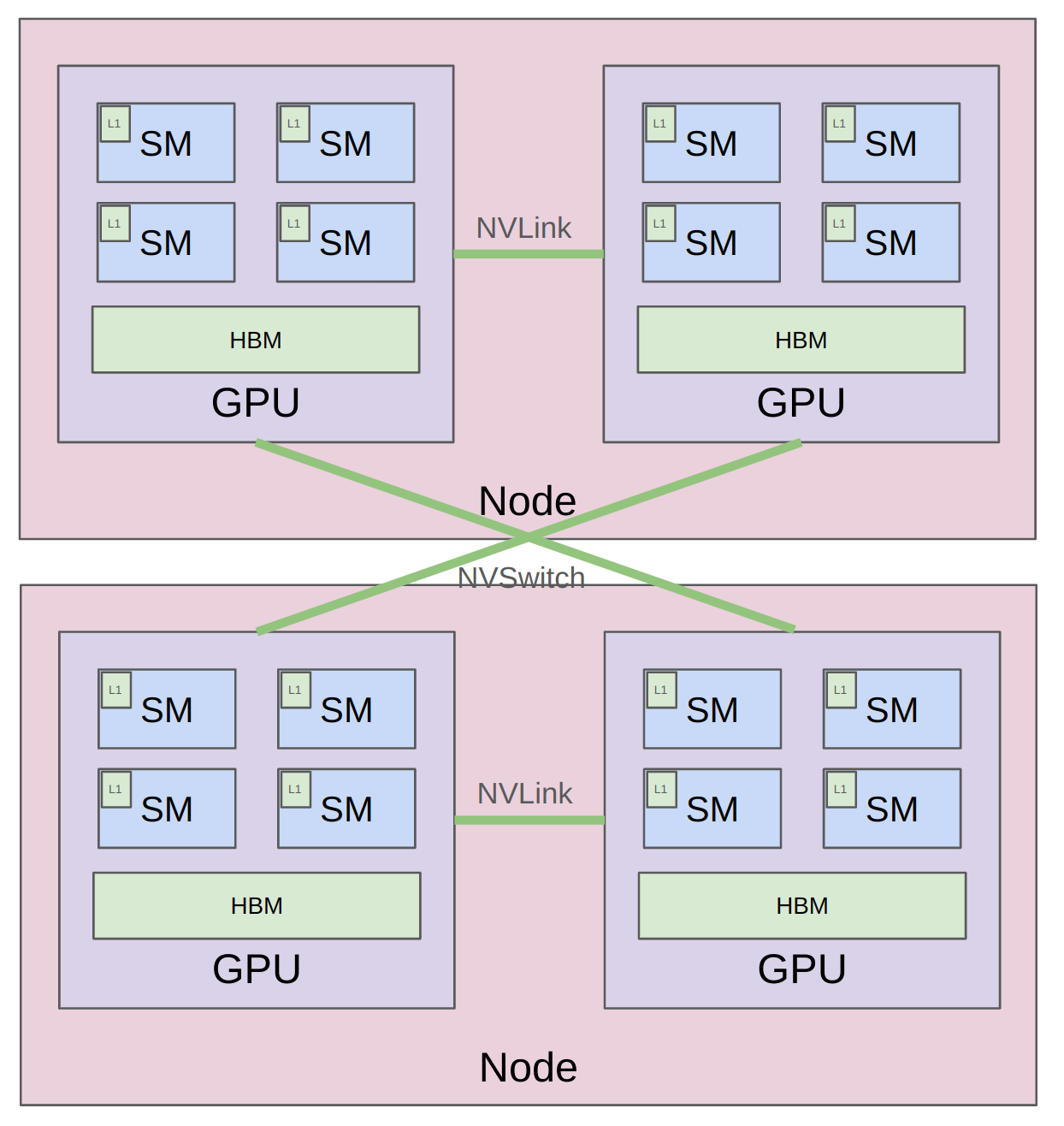
广义的内存层次结构 从小/快到大/慢:
单节点,单 GPU: L1 Cache / Shared Memory单节点,单 GPU: HBM (High Bandwidth Memory)单节点,多 GPU: NVLink多节点,多 GPU: NVSwitch
本讲目标: 用代码具体化上一讲的概念
Part 1: 分布式通信/计算的基础模块 1.1 集合操作 (Collective Operations) 定义: 分布式编程的概念原语
来源: 1980 年代并行编程文献中的经典概念
优势: 比自己管理点对点通信更好/更快的抽象
术语:
World Size(世界大小): 设备数量(例如 4)Rank(秩): 单个设备(例如 0, 1, 2, 3)
1.1.1 Broadcast(广播)
操作: 将一个设备的数据复制到所有设备
用途: 分发模型参数、配置信息
1.1.2 Scatter(分散)
操作: 将数据分割并分发到各个设备
用途: 分发数据批次
1.1.3 Gather(收集)
操作: 从所有设备收集数据到一个设备
用途: 收集预测结果、日志信息
1.1.4 Reduce(归约)
操作: 对所有设备的数据执行关联/交换操作(sum, min, max)
用途: 计算全局统计量
1.1.5 All-Gather(全收集)
操作: 每个设备都收集所有设备的数据
用途: 同步分片数据
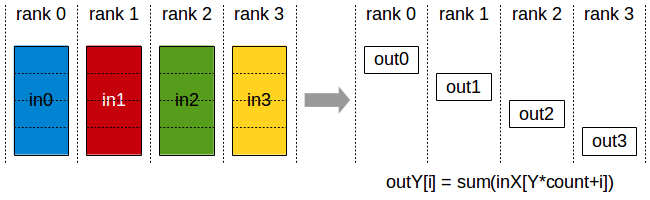
1.1.6 Reduce-Scatter(归约分散)
操作: 归约后将结果分散到各设备
用途: 梯度同步的第一步
1.1.7 All-Reduce(全归约)
关键关系: All-Reduce = Reduce-Scatter + All-Gather
用途: 梯度同步(最常用)
记忆技巧
Reduce: 执行关联/交换操作(sum, min, max)Broadcast/Scatter: 是 Gather 的逆操作All: 目标是所有设备
1.2 硬件架构 经典架构(家用)
同节点 GPU: 通过 PCIe 总线通信(v7.0, 16 lanes => 242 GB/s)跨节点 GPU: 通过以太网通信(~200 MB/s)
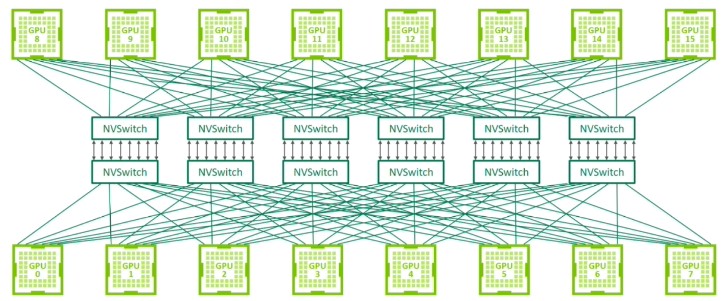
现代架构(数据中心)
节点内: NVLink 直连 GPU,绕过 CPU跨节点: NVSwitch 直连 GPU,绕过以太网
H100 规格:
18 个 NVLink 4.0 链路
总带宽:900 GB/s
对比 HBM 带宽:3.9 TB/s
查看硬件拓扑:
1.3 NVIDIA Collective Communication Library (NCCL) 功能: 将集合操作转换为 GPU 间传输的底层数据包
工作流程:
检测硬件拓扑(节点数、交换机、NVLink/PCIe)
优化 GPU 间路径
启动 CUDA kernel 发送/接收数据
参考: NCCL Talk
1.4 PyTorch Distributed (torch.distributed) 文档: PyTorch Distributed
功能:
提供集合操作的简洁接口(如 all_gather_into_tensor)
支持多种后端:gloo (CPU), nccl (GPU)
支持高级算法(如 FullyShardedDataParallel)
示例代码:All-Reduce 1 2 3 4 5 6 7 8 9 10 11 12 13 14 def collective_operations_main (rank: int , world_size: int ):0. , 1 , 2 , 3 ], device=get_device(rank)) + rankprint (f"Rank {rank} [before all-reduce]: {tensor} " )False )print (f"Rank {rank} [after all-reduce]: {tensor} " )
输出示例(world_size=4):
1 2 3 4 5 6 7 8 9 Rank 0 :
示例代码:Reduce-Scatter + All-Gather 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 input = torch.arange(world_size, dtype=torch.float32, device=get_device(rank)) + rank1 , device=get_device(rank))print (f"Rank {rank} [before reduce-scatter]: input = {input } , output = {output} " )input =input , op=dist.ReduceOp.SUM, async_op=False )print (f"Rank {rank} [after reduce-scatter]: input = {input } , output = {output} " )input = outputprint (f"Rank {rank} [before all-gather]: input = {input } , output = {output} " )input , async_op=False )print (f"Rank {rank} [after all-gather]: input = {input } , output = {output} " )
验证: All-Reduce = Reduce-Scatter + All-Gather ✅
1.5 性能测试 All-Reduce 性能测试 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 def all_reduce (rank: int , world_size: int , num_elements: int ):False )False )2 * (world_size - 1 ) print (f"Rank {rank} : bandwidth = {round (bandwidth / 1024 **3 )} GB/s" )
测试:
1 spawn(all_reduce, world_size=4 , num_elements=100 * 1024 **2 )
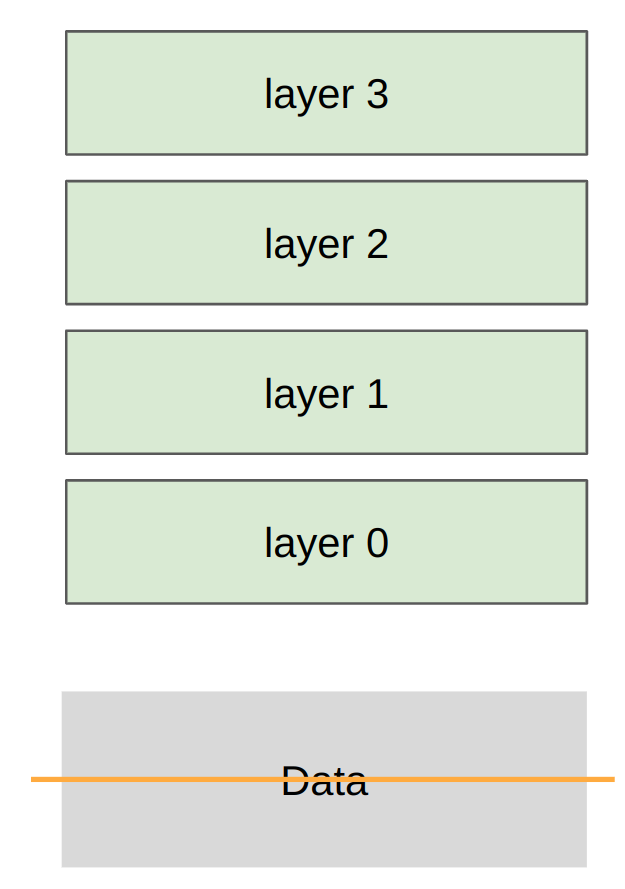
Part 2: 分布式训练策略 示例模型: 深度 MLP(多层感知机)
原因: MLP 是 Transformer 的计算瓶颈,具有代表性
三种并行策略:
Data Parallelism(数据并行): 沿批次维度切分Tensor Parallelism(张量并行): 沿宽度维度切分Pipeline Parallelism(流水线并行): 沿深度维度切分
2.1 Data Parallelism(数据并行)
分片策略: 每个 rank 获得数据的一个切片
实现代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 def data_parallelism_main (rank: int , world_size: int , data: torch.Tensor, num_layers: int , num_steps: int ):0 )for i in range (num_layers)]1e-3 )for step in range (num_steps):for param in params:for param in params:False )print (f"Rank {rank} : step = {step} , loss = {loss.item()} " )
关键观察 不同之处:
✅ 每个 rank 的 Loss 不同(基于本地数据计算)
✅ 梯度通过 all-reduce 同步,所有 rank 相同
✅ 因此,参数在所有 rank 上保持一致
通信成本:
每步需要 all-reduce 所有梯度
通信量 = 模型参数量
优点:
缺点:
每个 GPU 需要存储完整模型
通信开销随模型大小增长
2.2 Tensor Parallelism(张量并行)
分片策略: 每个 rank 获得每层的一部分,传输所有数据/激活
实现代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 def tensor_parallelism_main (rank: int , world_size: int , data: torch.Tensor, num_layers: int ):0 )1 )for i in range (num_layers)]for i in range (num_layers):for _ in range (world_size)]False )1 )print (f"Rank {rank} : forward pass produced activations {summarize_tensor(x)} " )
关键观察 内存分布:
✅ 每个 rank 只存储部分参数
✅ 激活需要在所有 rank 间通信
通信成本:
每层需要 all-gather 激活
通信量 = 激活大小 × 层数
优点:
缺点:
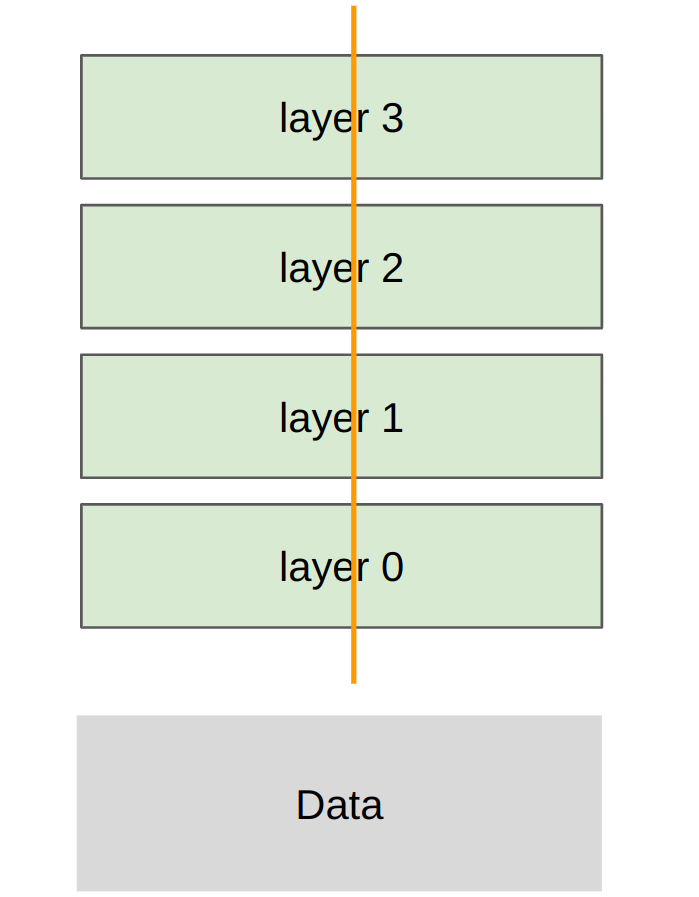
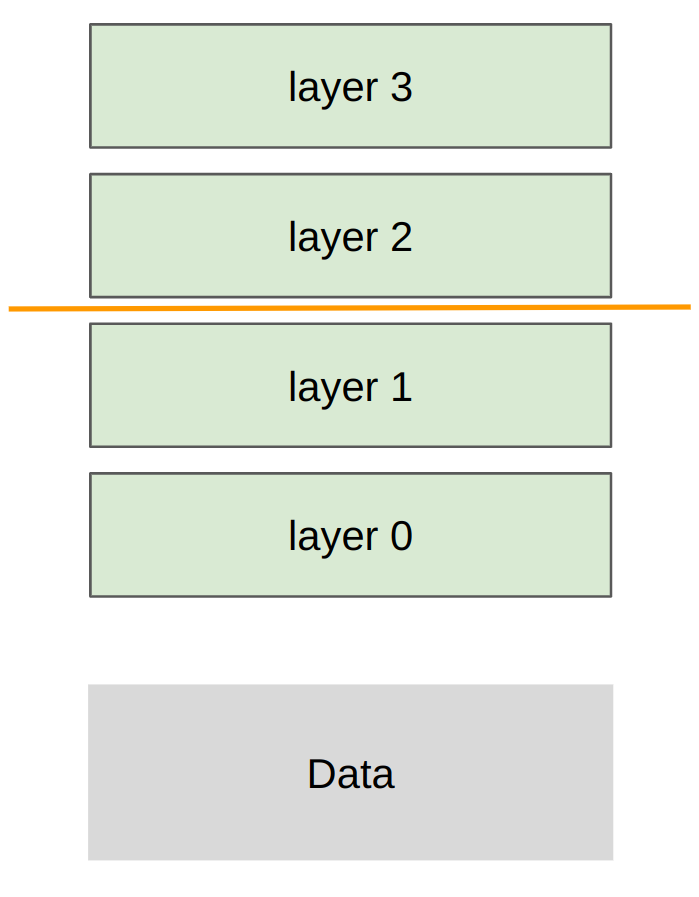
2.3 Pipeline Parallelism(流水线并行)
分片策略: 每个 rank 获得层的子集,传输所有数据/激活
实现代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 def pipeline_parallelism_main (rank: int , world_size: int , data: torch.Tensor, num_layers: int , num_micro_batches: int ):0 )1 )for i in range (local_num_layers)]if rank == 0 :0 )else :for _ in range (num_micro_batches)]for x in micro_batches:if rank - 1 >= 0 :1 )for param in local_params:if rank + 1 < world_size:print (f"Rank {rank} : sending {summarize_tensor(x)} to rank {rank + 1 } " )1 )
关键观察 Micro-Batch 技术:
将批次分成更小的 micro-batch
减少流水线气泡(idle time)
提高 GPU 利用率
通信模式:
点对点通信(send/recv)
只在相邻 rank 间通信
优点:
内存效率高(每个 GPU 只存储部分层)
适合深模型
缺点:
流水线气泡导致 GPU 空闲
需要精心设计 micro-batch 调度
并行策略对比
策略
分片维度
通信模式
内存效率
适用场景
Data Parallelism Batch
All-Reduce
低(完整模型)
小模型,大批次
Tensor Parallelism Width
All-Gather
中(参数分片)
宽模型
Pipeline Parallelism Depth
Send/Recv
高(层分片)
深模型
混合并行策略 实际应用: 通常组合多种策略
示例:GPT-3 训练
Data Parallelism: 跨节点
Tensor Parallelism: 节点内(利用 NVLink)
Pipeline Parallelism: 跨层
其他并行维度:
Sequence Parallelism: 沿序列长度切分Expert Parallelism: MoE 模型中的专家并行
高级话题 通信与计算重叠 目标: 在计算时进行通信,隐藏通信延迟
技术:
异步通信(async_op=True)
梯度累积
流水线调度
内存优化 权衡:
重计算(Recomputation): 节省内存,增加计算存储(Memory): 增加内存,减少计算通信(Communication): 存储在其他 GPU,需要通信
ZeRO 优化:
ZeRO-1: 优化器状态分片
ZeRO-2: 梯度分片
ZeRO-3: 参数分片
课程未涵盖的内容 更复杂的模型:
更多优化:
其他框架:
JAX/TPU: 只需定义模型和分片策略,编译器处理其余部分
PyTorch: 本课程使用,可以看到如何从原语构建
总结 核心概念
多种并行化方式:
Data(batch)
Tensor/Expert(width)
Pipeline(depth)
Sequence(length)
三种权衡:
重计算(Recompute) 存储在内存(Memory) 存储在其他 GPU 并通信(Communicate)
硬件趋势:
硬件越来越快
但总是想要更大的模型
因此总会有这种层次结构
关键原则 统一主题: 编排计算以避免数据传输瓶颈
上周: 单 GPU 内 - 减少内存访问(融合/分块)本周: 多 GPU 间 - 减少通信(复制/分片)
实践建议 Setup 函数 1 2 3 4 5 6 7 8 9 10 11 12 def setup (rank: int , world_size: int ):"MASTER_ADDR" ] = "localhost" "MASTER_PORT" ] = "15623" if torch.cuda.is_available():"nccl" , rank=rank, world_size=world_size)else :"gloo" , rank=rank, world_size=world_size)def cleanup ():
多进程启动 1 2 3 4 from lecture_08_utils import spawn4 , **kwargs)
延伸阅读 NCCL 性能:
分布式训练:
硬件:
作业练习
实现 Tensor Parallelism 的反向传播 实现 Pipeline Parallelism 的反向传播 测量不同并行策略的通信开销 实现混合并行策略(Data + Tensor) 优化流水线调度以减少气泡