大模型从0到1|第五讲:详解 GPU 架构与性能优化
大模型从0到1|第五讲:详解 GPU 架构与性能优化
讲师: Tatsu H
核心主题: 深入剖析 GPU 的底层硬件原理、性能分析方法论(Roofline Model),以及如何通过 Tiling、Fusion、Coalescing 等技巧优化深度学习负载,最后以 FlashAttention 为例进行融会贯通。
Part 1: GPU 深度解析 (GPUs in Depth)
Page 1: 课程标题
- 内容解析: 课程正式开始。本节课的主题是 GPUs。在深度学习时代,理解 GPU 不仅仅是系统工程师的工作,对于算法工程师理解模型扩展性(Scaling)和性能瓶颈至关重要。
Page 2: 课程大纲
- 内容解析: 本节课的组织结构分为三部分:
- Part 1: GPUs in depth —— 深入硬件底层,讲解 GPU 的工作原理、内存层级和核心组件。
- Part 2: Understanding GPU performance —— 讲解如何让 GPU 跑得快,介绍 Roofline 模型和关键优化技巧。
- Part 3: Putting it together —— 拆解 FlashAttention,看它如何综合运用上述技巧解决实际问题。
Page 3: 致谢与资源
- 内容解析: 课程内容参考了多个高质量来源。
- Horace He’s blog: “Thonk From First Principles”,非常硬核的 ML 系统博客。
- CUDA MODE: 一个专注于 CUDA 编程和高性能计算的开源社区和 Discord 群组,推荐学生加入。
Page 4: 背景 - 算力即性能
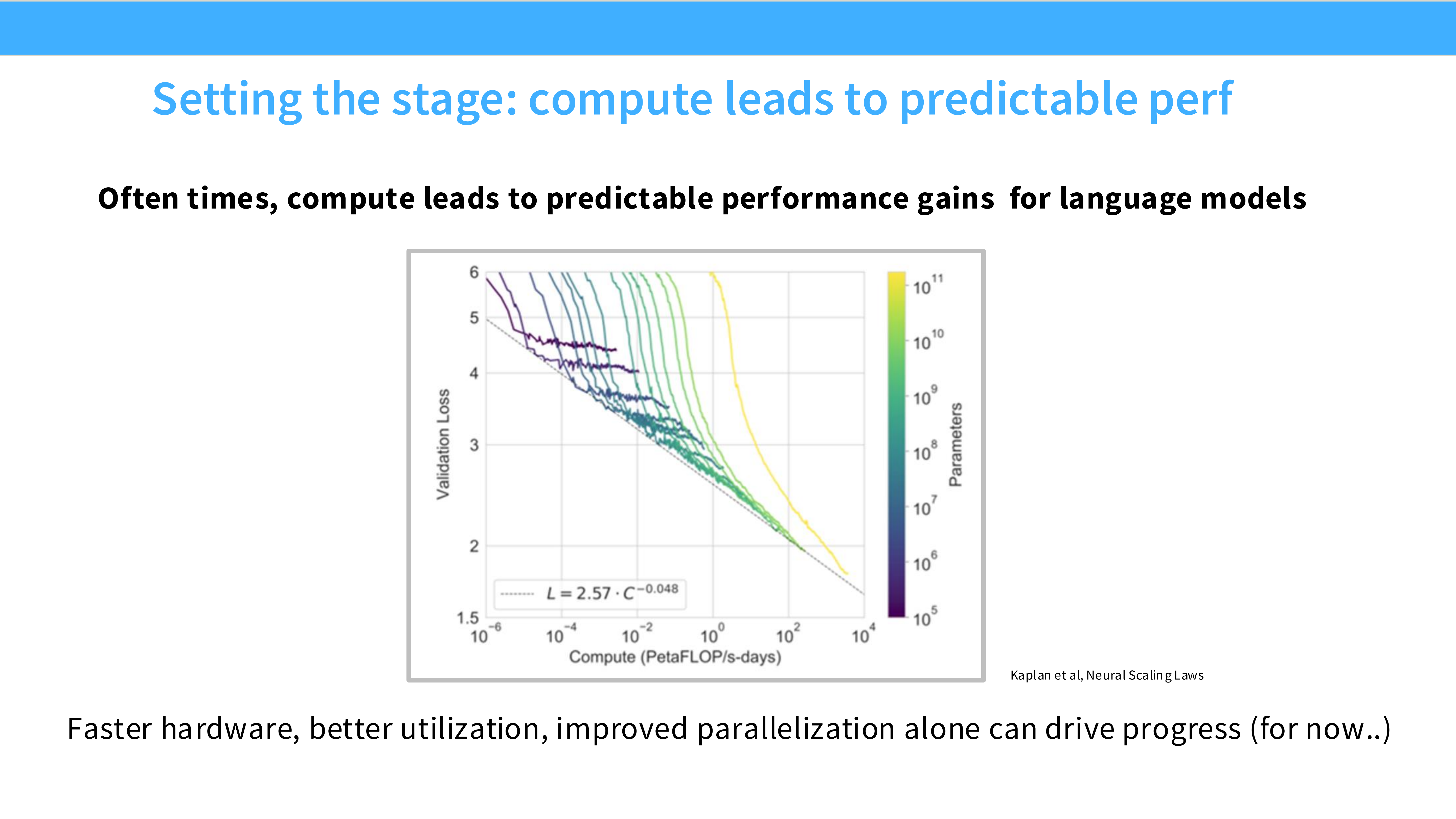
- 内容解析: 这张图展示了 Scaling Laws(扩展定律)。
- 现象: 随着计算量(Compute, PetaFLOP/s-days)的指数级增加,模型的 Loss 呈现线性下降趋势。
- 结论: 对于语言模型来说,算力通常能直接转化为可预测的性能提升。硬件越快,我们在单位时间内能跑的算力越多,模型效果就越好。
Page 5: 计算扩展的瓶颈 - Dennard Scaling 失效
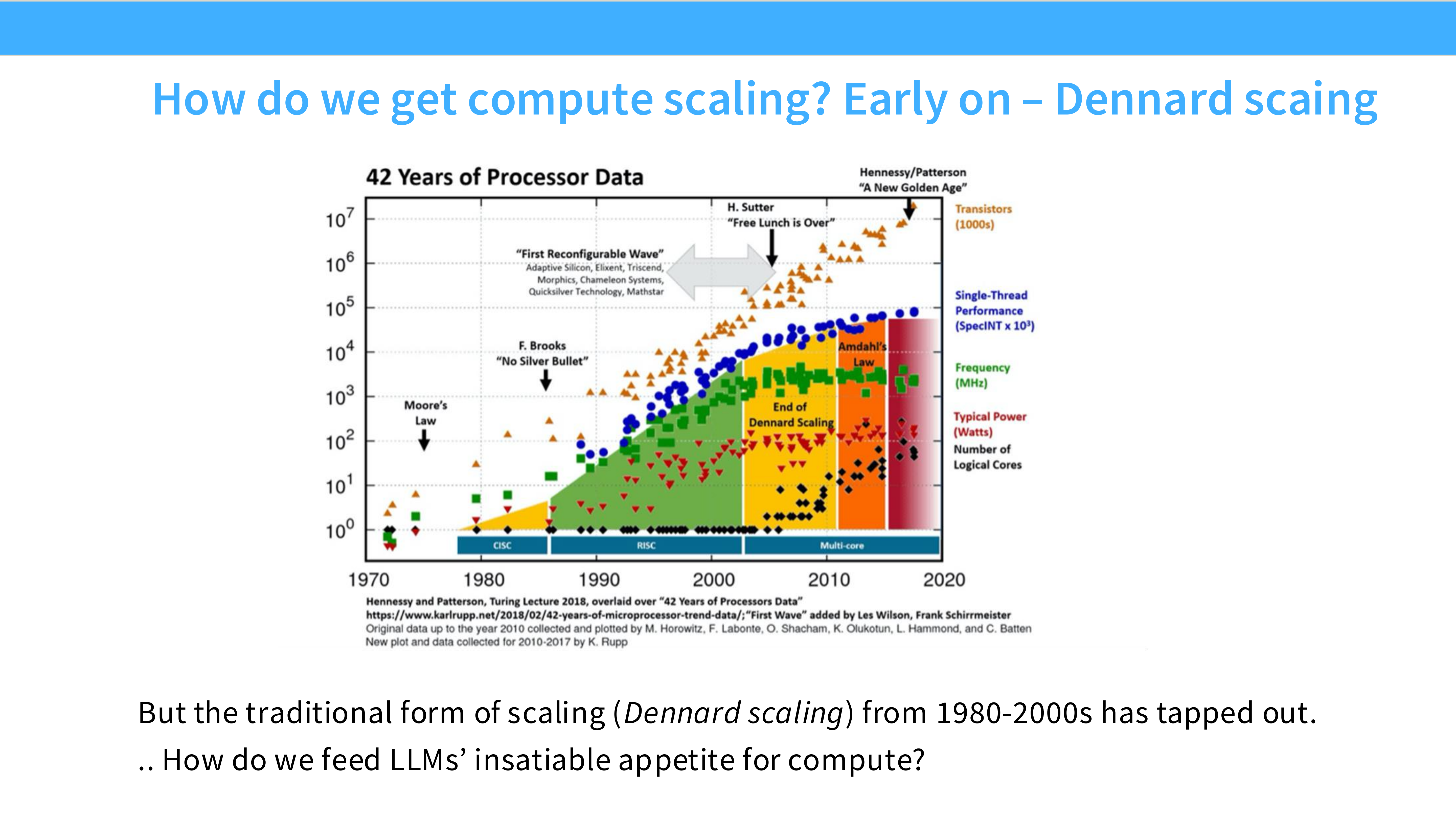
- 内容解析: 回顾处理器历史(1970-2010)。
- 趋势: 绿色点代表频率(Frequency)。在 2005 年之前,频率随时间指数增长;但 2005 年后,频率增长停滞(Plateau)。
- 原因: Dennard Scaling(登纳德缩放比例定律) 失效。由于功耗和散热限制(Power Wall),单核性能无法再通过单纯提高主频来提升。这迫使我们寻找新的扩展路径。
Page 6: 并行扩展的接力 (Parallel Scaling)
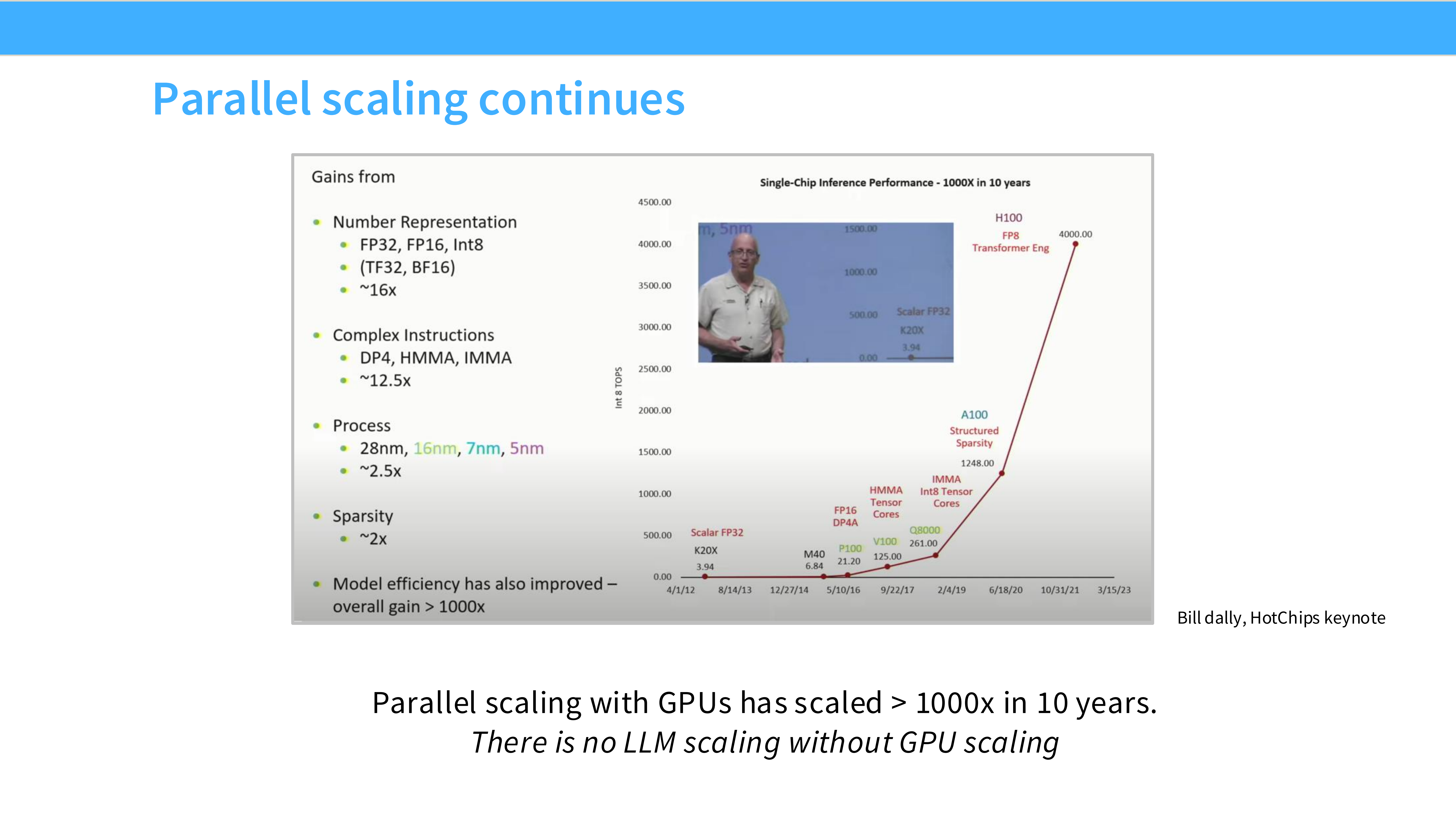
- 内容解析: 既然单核快不起来,那就堆核心。
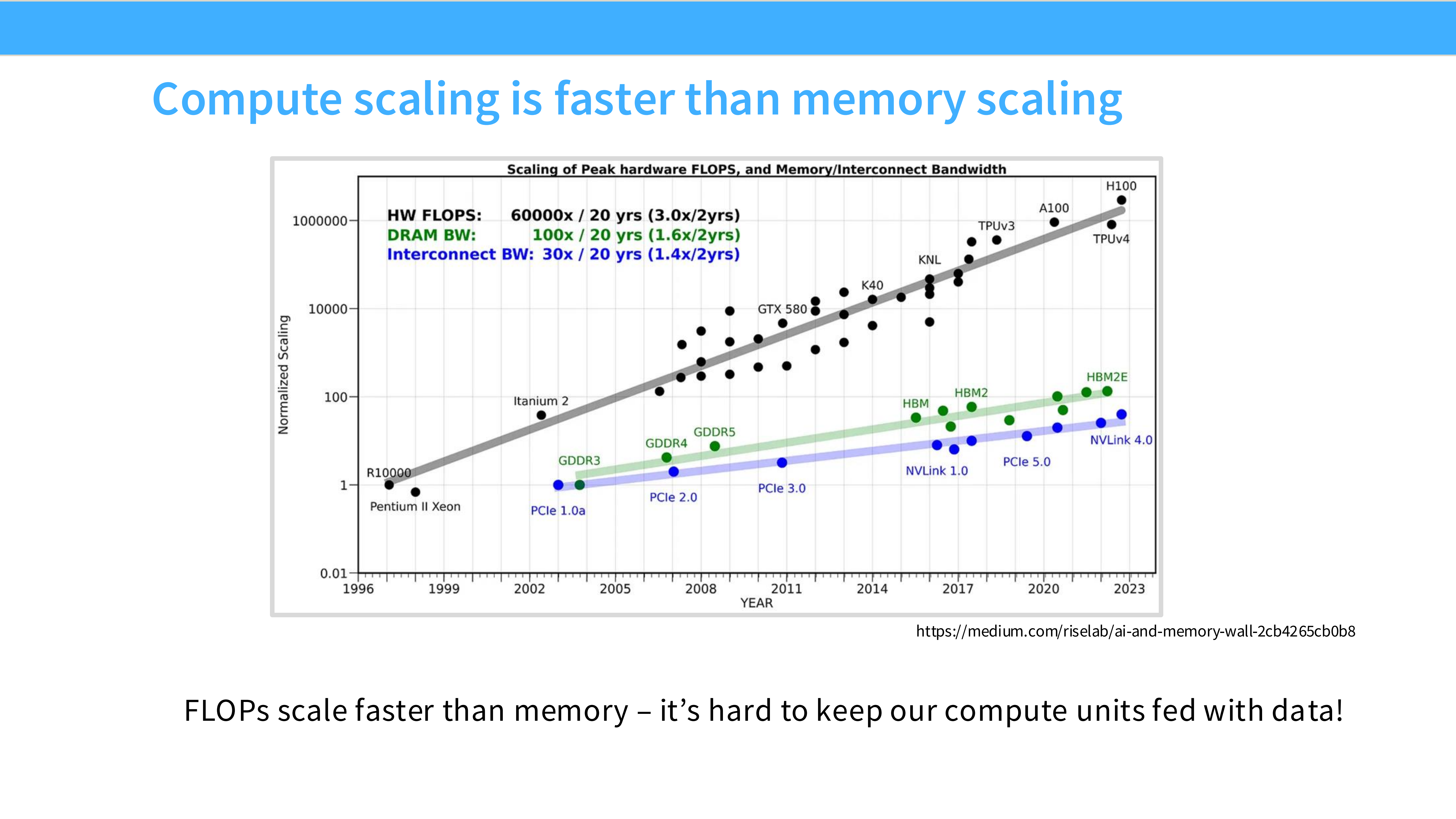
- 图表: 展示了 GPU(如 K80 到 H100)和 TPU 算力在过去 10 年的爆发式增长。
- 关键点: 虽然内存带宽(Memory)也在增长,但计算能力(Compute, 尤其是低精度计算)的增长速度远超内存。
- 结论: LLM 的扩展完全依赖于 GPU 的并行扩展能力。
Page 7: GPU 模型的优势
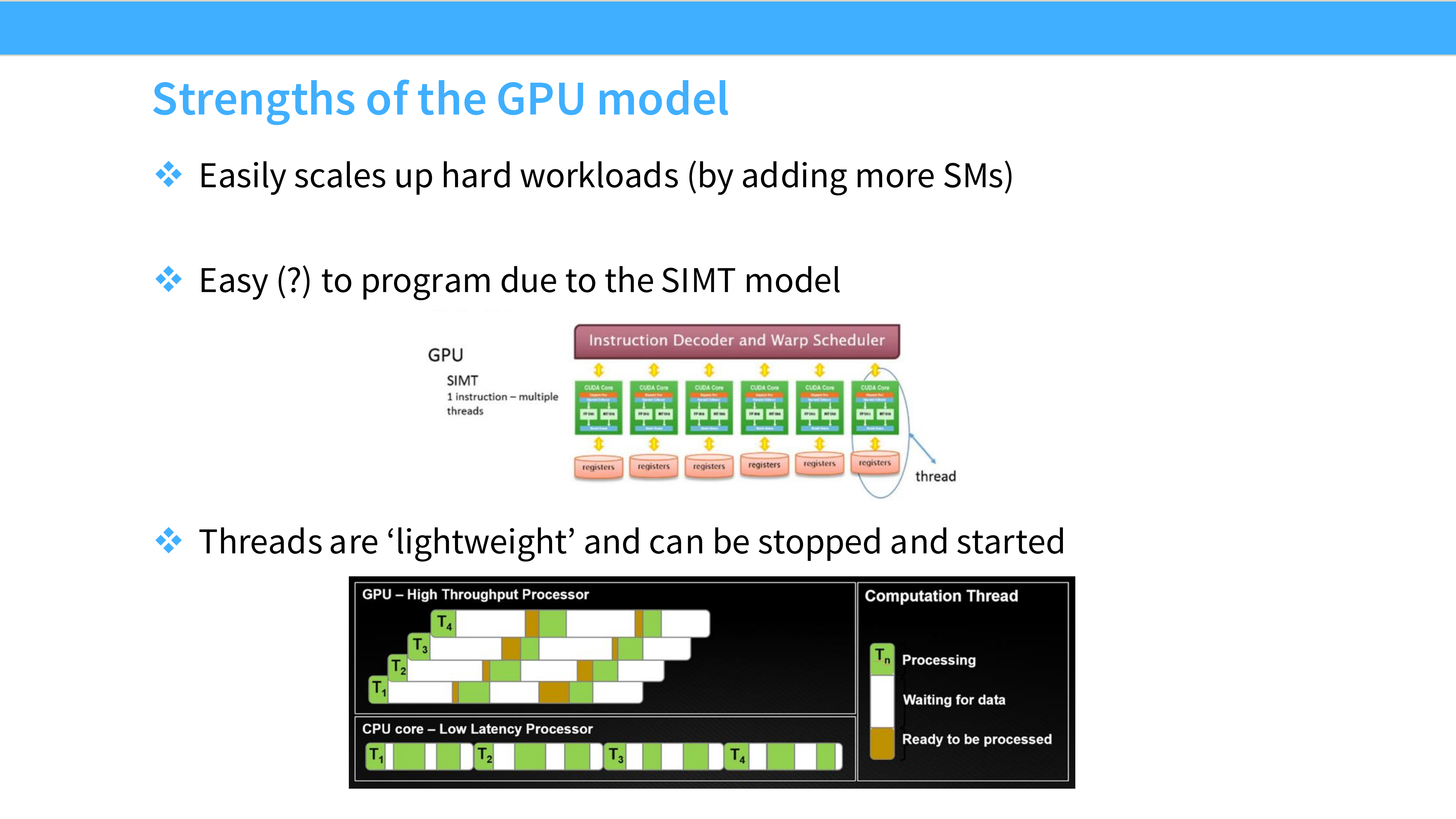
- 内容解析: 为什么 GPU 能成为 AI 的主力?
- 易于扩展 (Scalability): GPU 架构是模块化的,可以通过增加 SM (Streaming Multiprocessors) 轻松扩展算力。
- 编程模型 (SIMT): 单指令多线程。虽然编写复杂,但适合处理大规模数据并行任务。
- 轻量级线程: GPU 线程启动和切换极快,能够以低开销隐藏延迟。
Page 8: CPU vs. GPU 架构设计
- 内容解析:
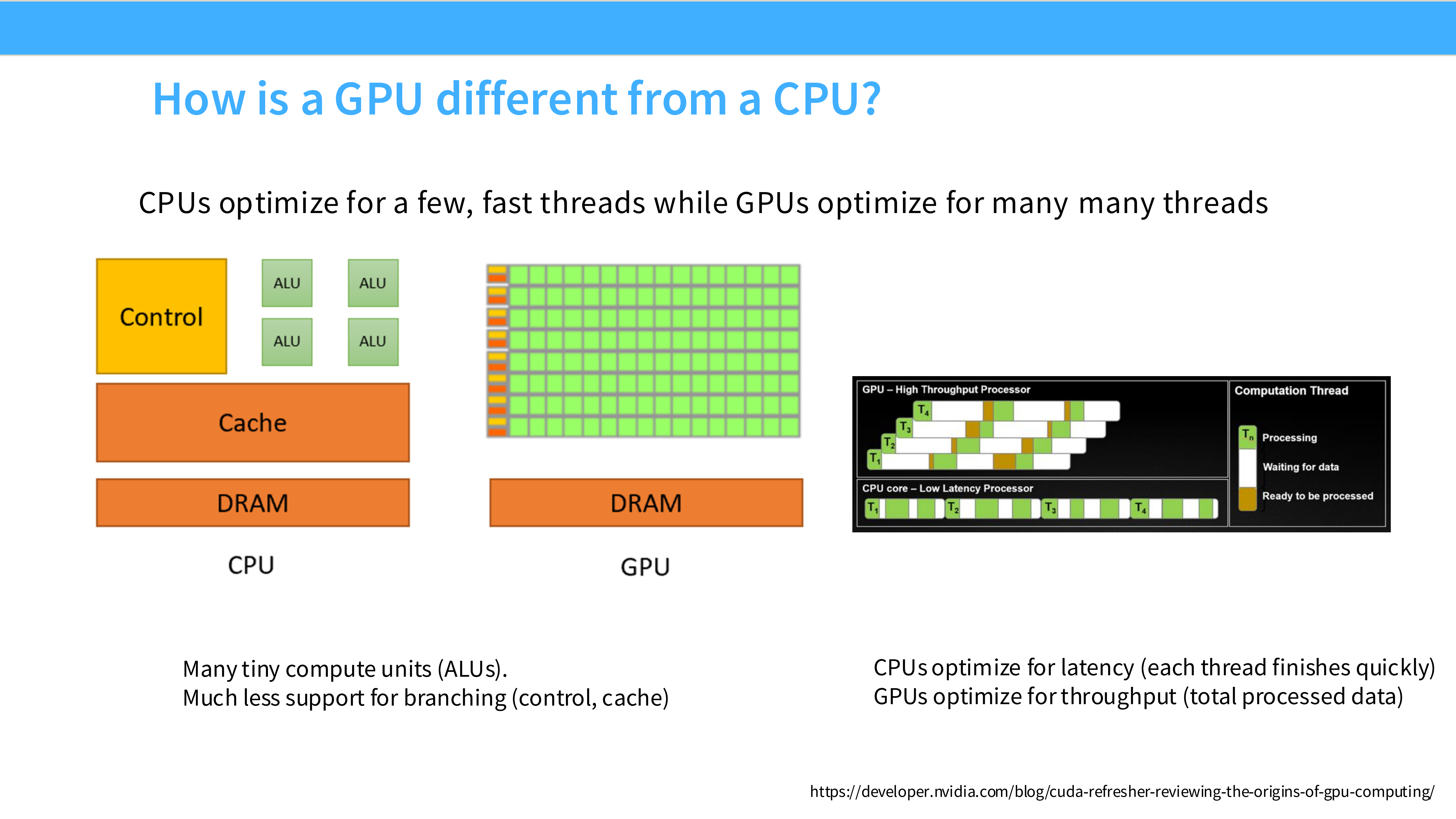
- CPU (左): 巨大的 Cache 和复杂的 Control 单元,ALU(计算单元)占比小。
- 目标: **低延迟 (Latency)**。擅长逻辑复杂的串行任务。
- GPU (右): 绝大部分面积是绿色的 ALU,Control 和 Cache 很小。
- 目标: **高吞吐 (Throughput)**。擅长海量数据的并行处理,不介意单个任务的延迟,只在乎整体完成量。
- CPU (左): 巨大的 Cache 和复杂的 Control 单元,ALU(计算单元)占比小。
Page 9: GPU 解剖 - 宏观与微观
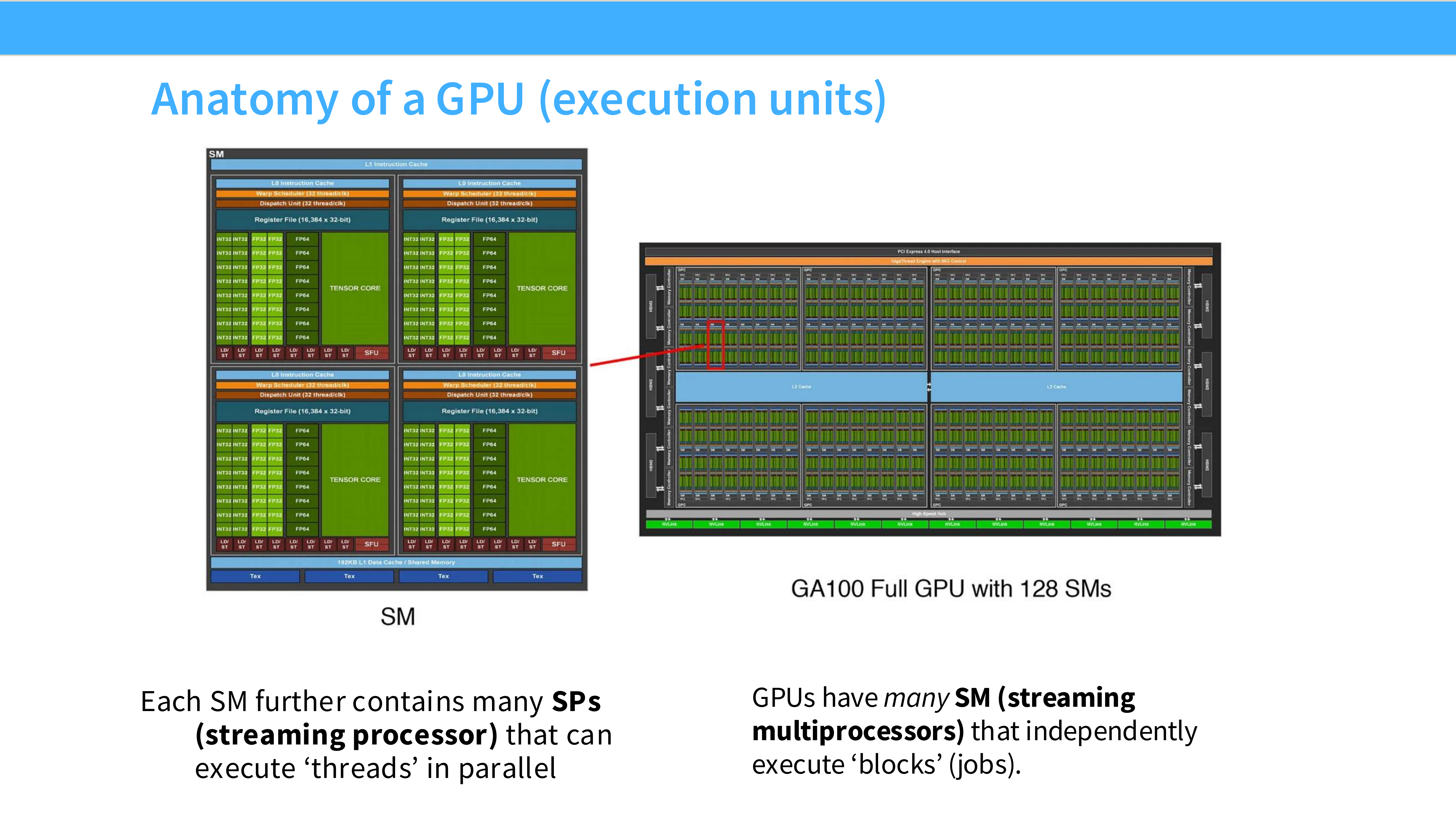
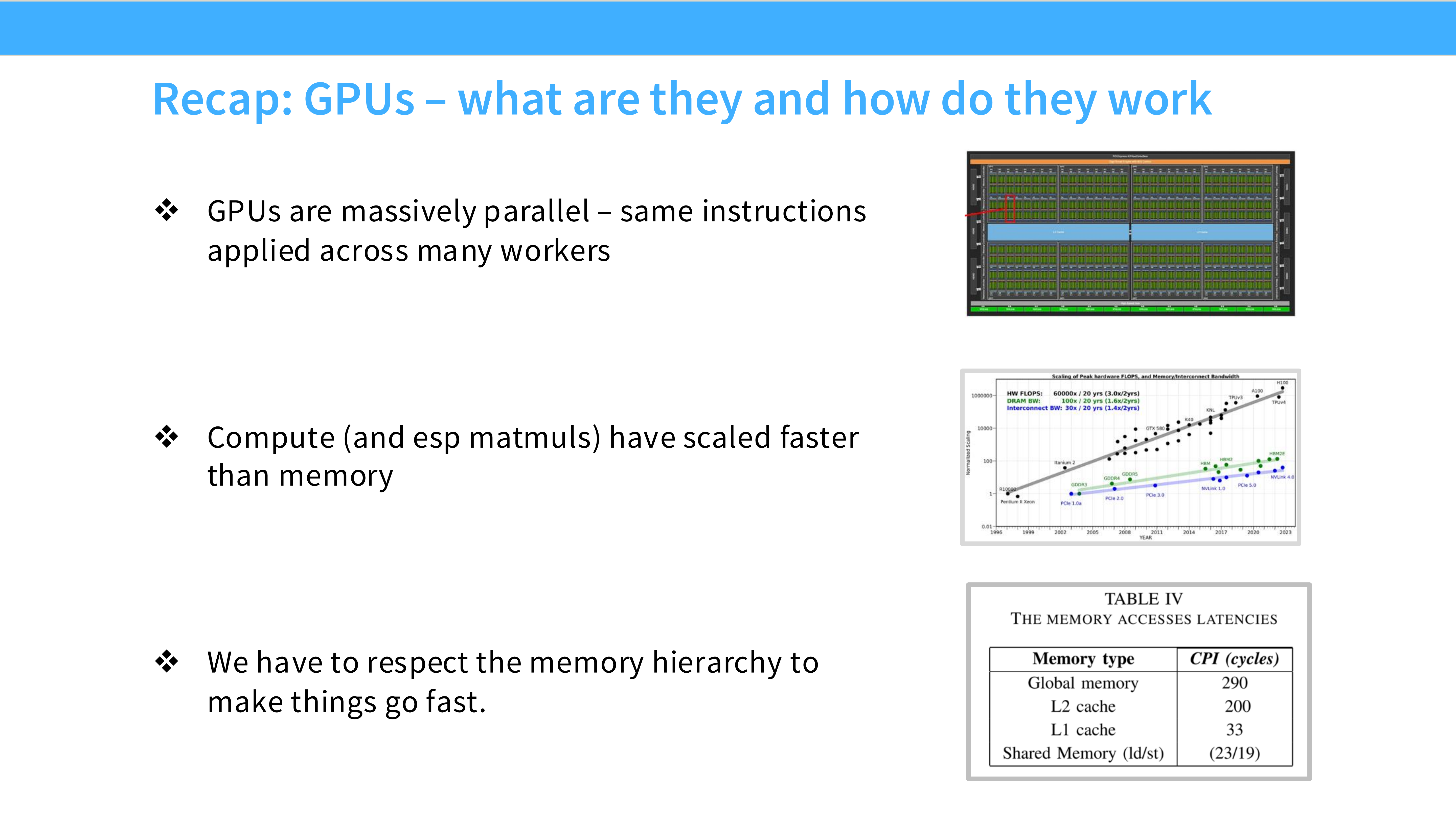
- 内容解析:
- GA100 Full GPU (右): 宏观上看,GPU 由 128 个 SM (Streaming Multiprocessors) 组成。
- SM 内部 (左): 每个 SM 包含多个 SP (Streaming Processor) 也就是 CUDA Core,以及专用的 Tensor Cores(用于矩阵加速)、寄存器堆(Register File)和调度器。
Page 10: GPU 解剖 - 内存层级
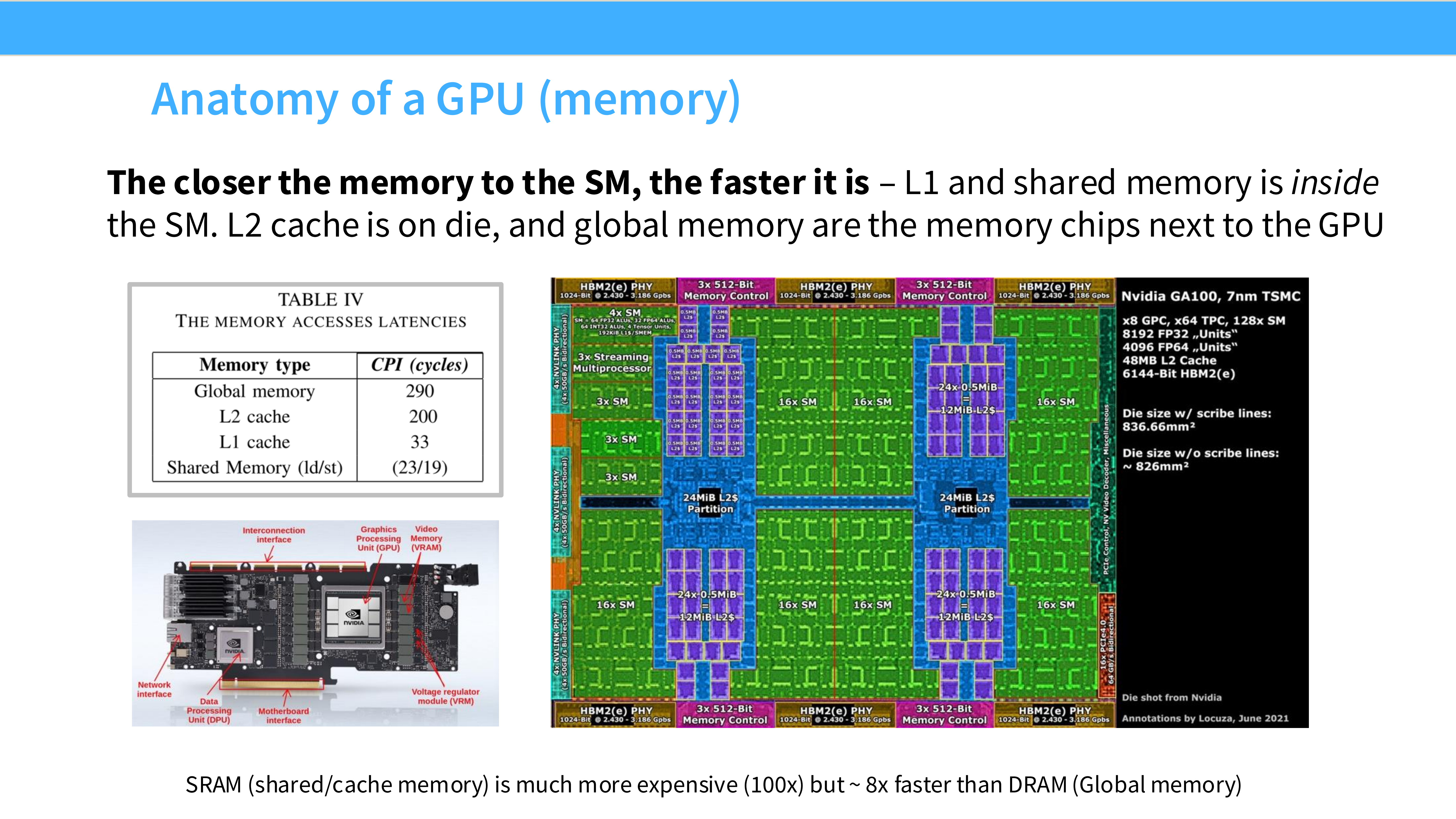
- 内容解析: 理解内存位置是优化的关键。
- L1 Cache / Shared Memory: 位于 SM 内部(图中绿色部分),是 SRAM。速度极快(19 TB/s),但容量极小。
- L2 Cache: 芯片中间,所有 SM 共享。
- HBM (High Bandwidth Memory): 芯片边缘的显存颗粒。这是 DRAM,容量大(40-80GB),但速度最慢(1.5-2.0 TB/s)。
- 法则: 离计算单元越近,速度越快,容量越小。
Page 11: GPU 执行模型
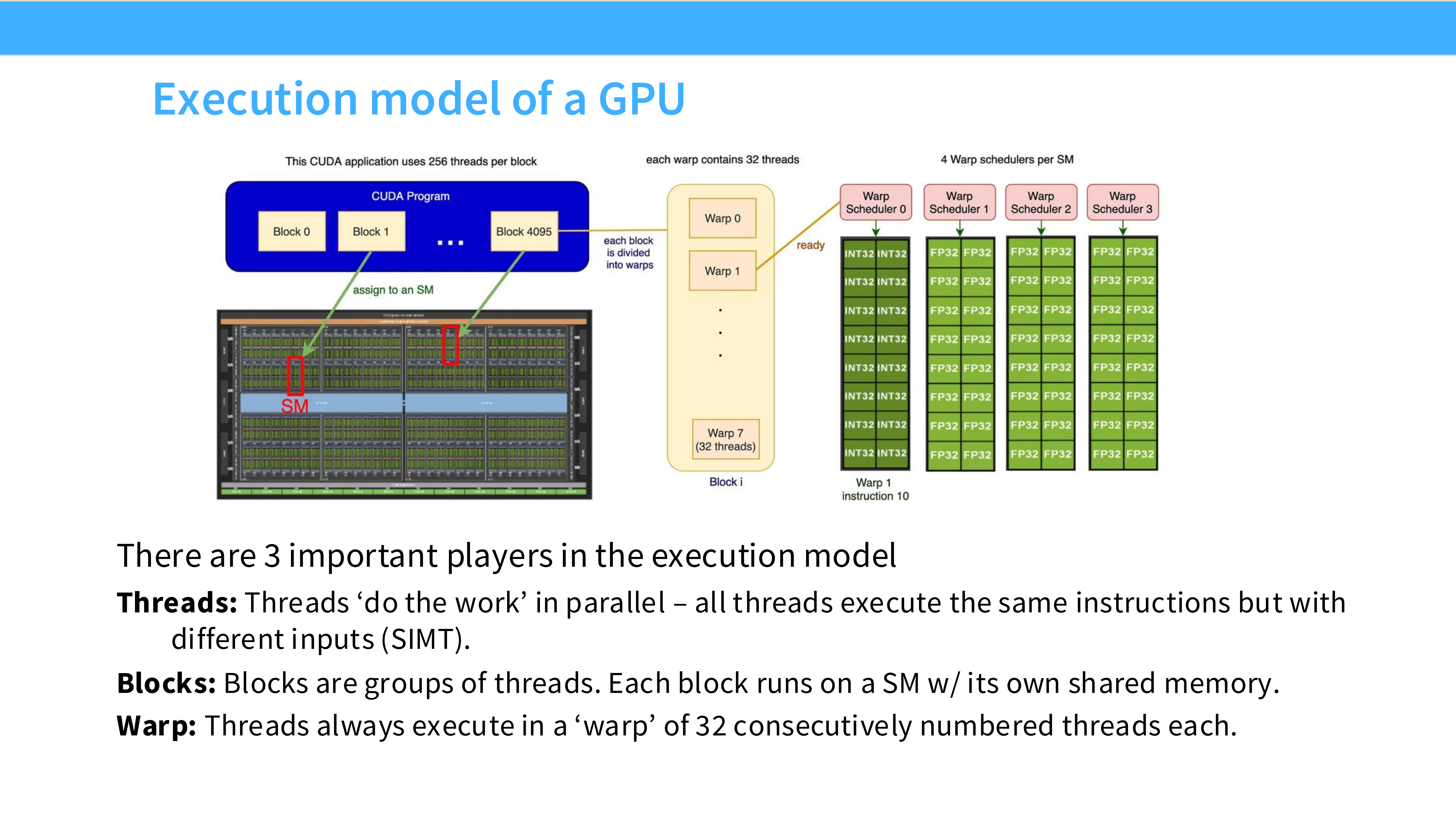
- 内容解析: 软件层面的三个核心概念:
- Threads (线程): 并行工作的最小单位。
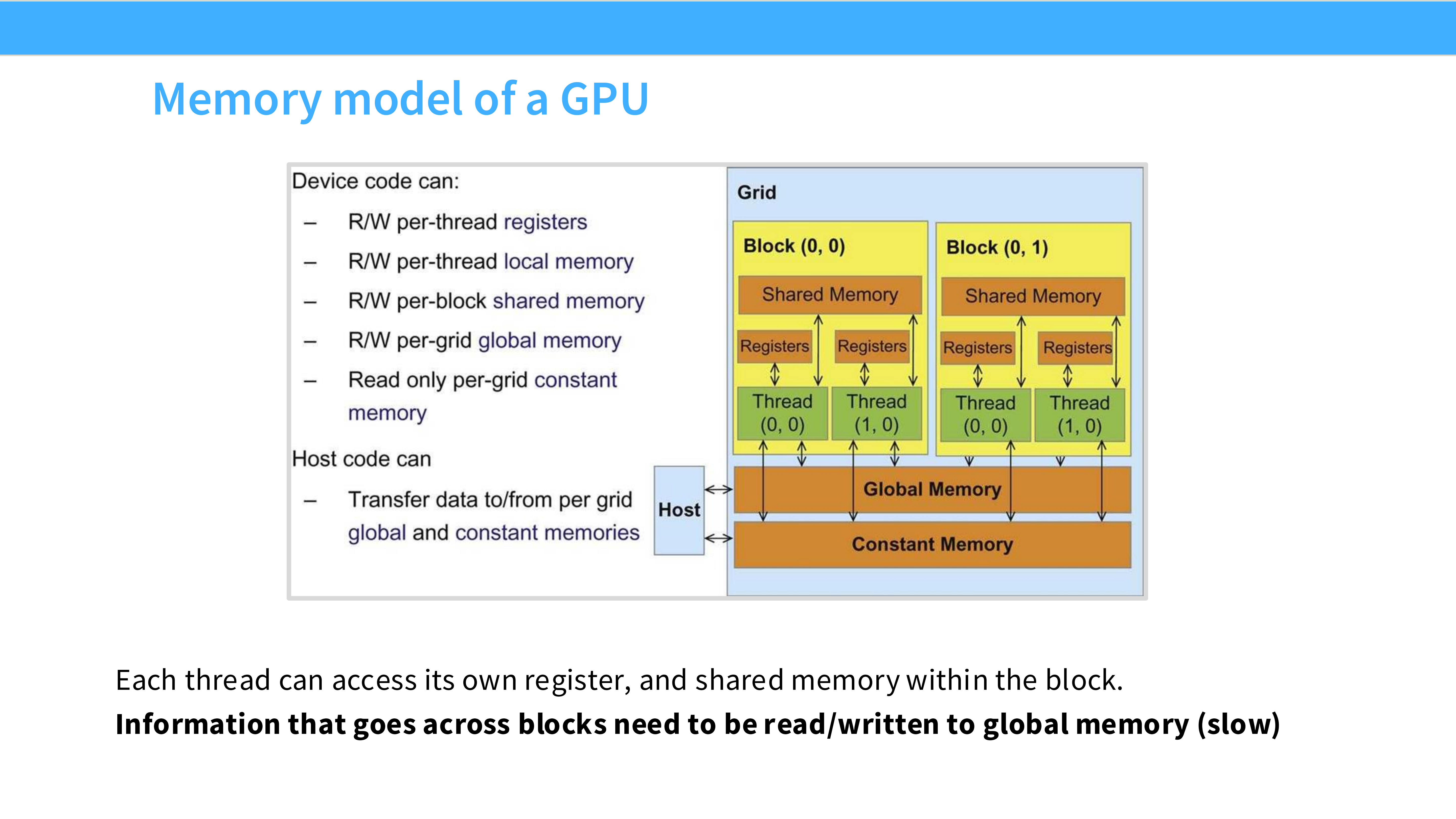
- Blocks (线程块): 一组线程,运行在同一个 SM 上,共享该 SM 的 Shared Memory。
- Warps (线程束): 硬件调度的最小单位,通常由 32 个连续线程 组成,物理上同步执行同一条指令。
Page 12: 侧记 - 关于 TPU
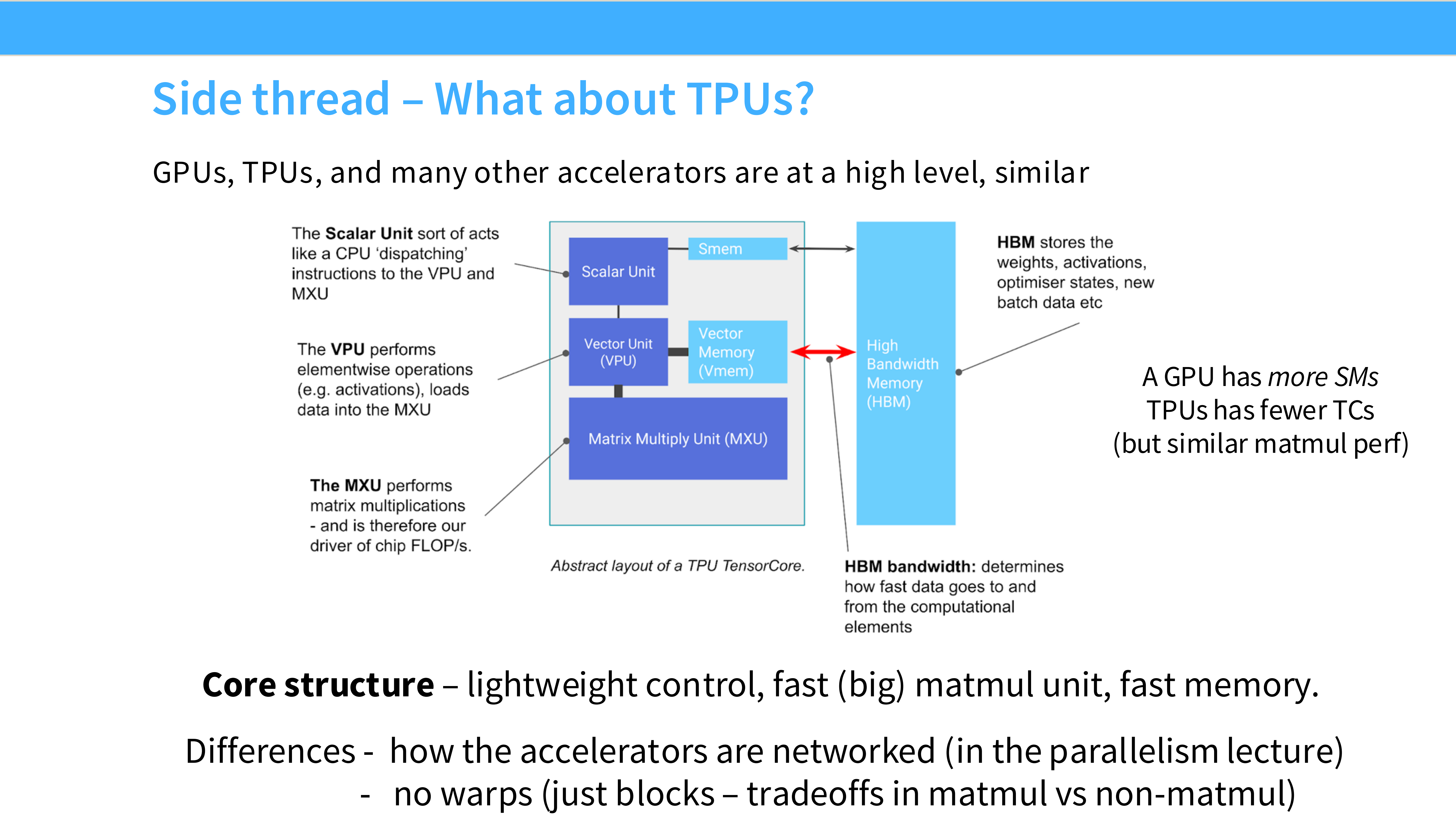
- 内容解析: TPU (Tensor Processing Unit) 与 GPU 的异同。
- 核心差异: GPU 有很多个通用的 SM;TPU 则拥有巨大的 **Matrix Multiply Unit (MXU)**,采用脉动阵列架构。
- 权衡: TPU 牺牲了通用性(Lightweight control),换取了极致的矩阵乘法密度。但在内存带宽(HBM)上,两者面临相似的物理限制。
Part 2: 理解 GPU 性能与优化 (Making ML Workloads Fast)
Page 13: Part 2 标题
- 内容解析: 如何让机器学习工作负载在 GPU 上飞快运行?这部分将介绍核心的性能模型和优化技巧。
Page 14: 屋顶模型 (The Roofline Model)
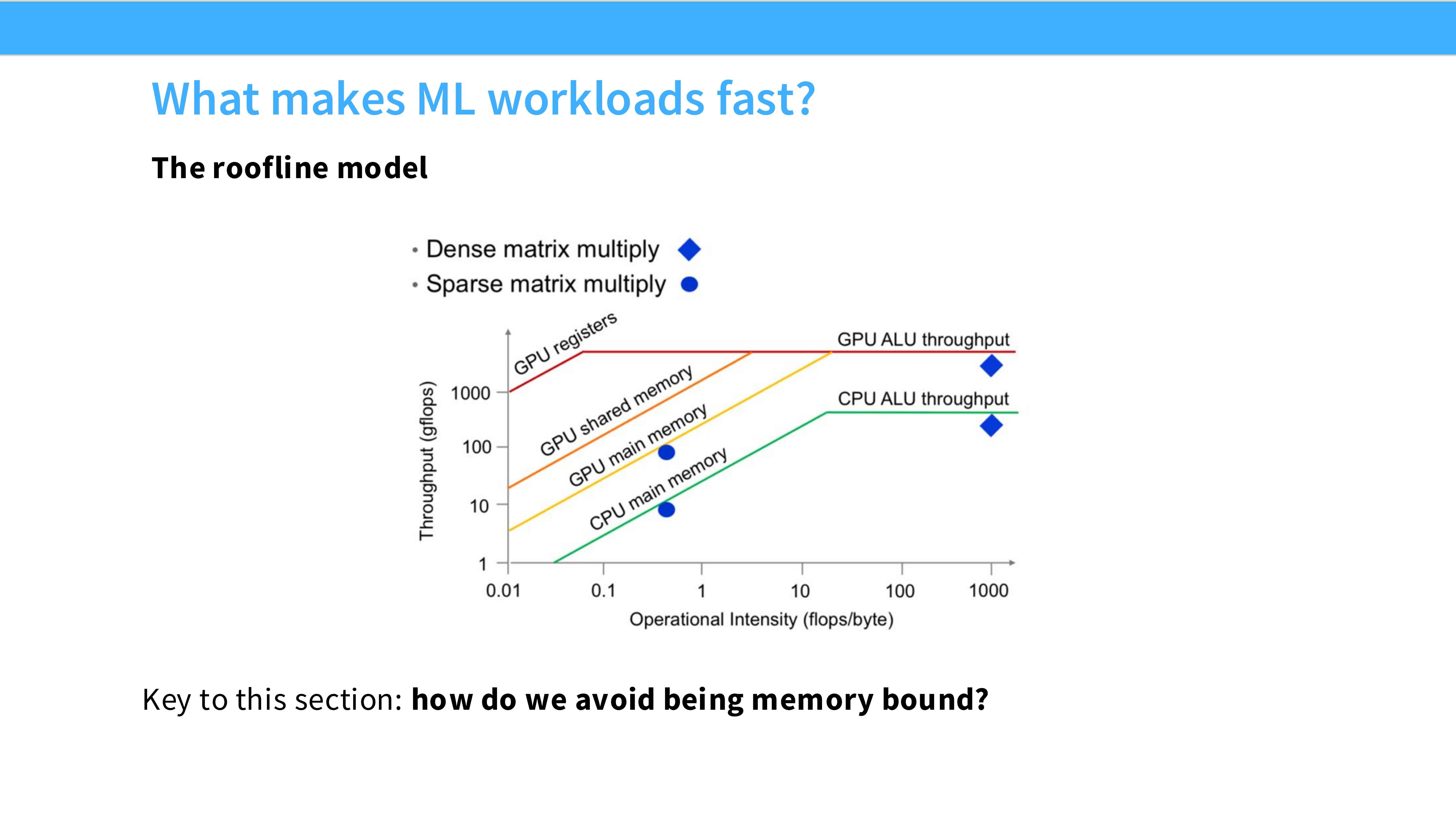
- 内容解析: 分析性能的黄金法则。
- Memory Bound (斜线): 算术强度 (FLOPs/Byte) 低。GPU 算得快,但数据传输慢,处于“等数据”状态。大多数 Element-wise 操作(如 Activation)在此区域。
- Compute Bound (平顶): 算术强度高。数据传输跟得上,瓶颈在于计算单元的峰值性能。大矩阵乘法在此区域。
- 优化目标: 提高算术强度,向右移动,利用满 GPU 的算力。
Page 15: 技巧 1 - 低精度计算 (Low Precision)
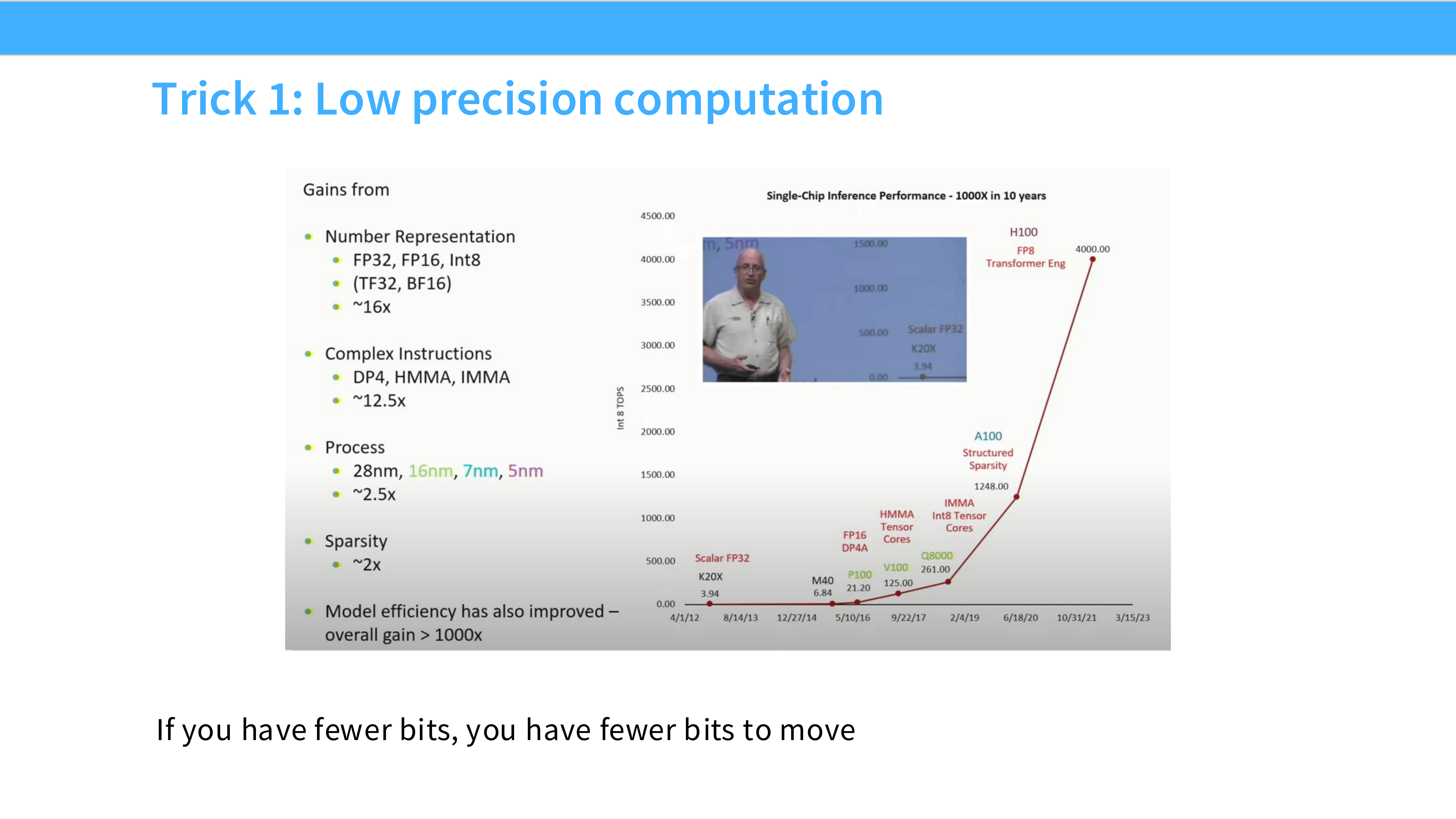
- 内容解析:
- 原理: 使用 FP16 (16-bit) 或 INT8 代替 FP32 (32-bit)。
- 收益: “If you have fewer bits, you have fewer bits to move.” 核心收益不仅仅是计算快了,更重要的是减少了数据搬运量,变相提升了内存带宽利用率。
Page 16: 低精度提升算术强度
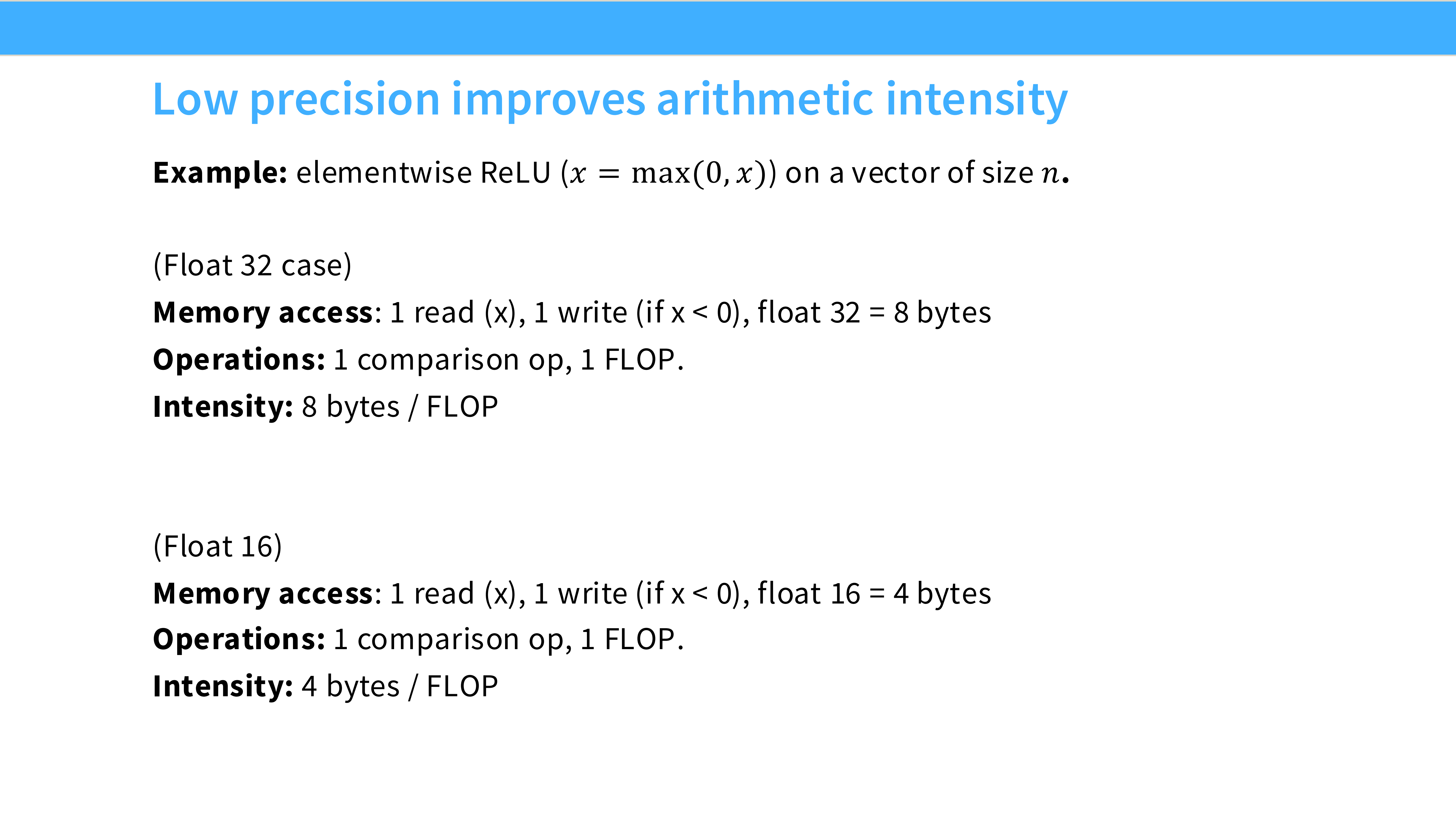
- 内容解析: 以 ReLU 为例:
- FP32: 读 4 字节,写 4 字节,算 1 次。强度 = 1/8 FLOP/Byte。
- FP16: 读 2 字节,写 2 字节,算 1 次。强度 = 1/4 FLOP/Byte。
- 结论: 切换到 FP16,算术强度翻倍,性能上限(在 Memory Bound 区域)直接翻倍。
Page 17: Tensor Cores
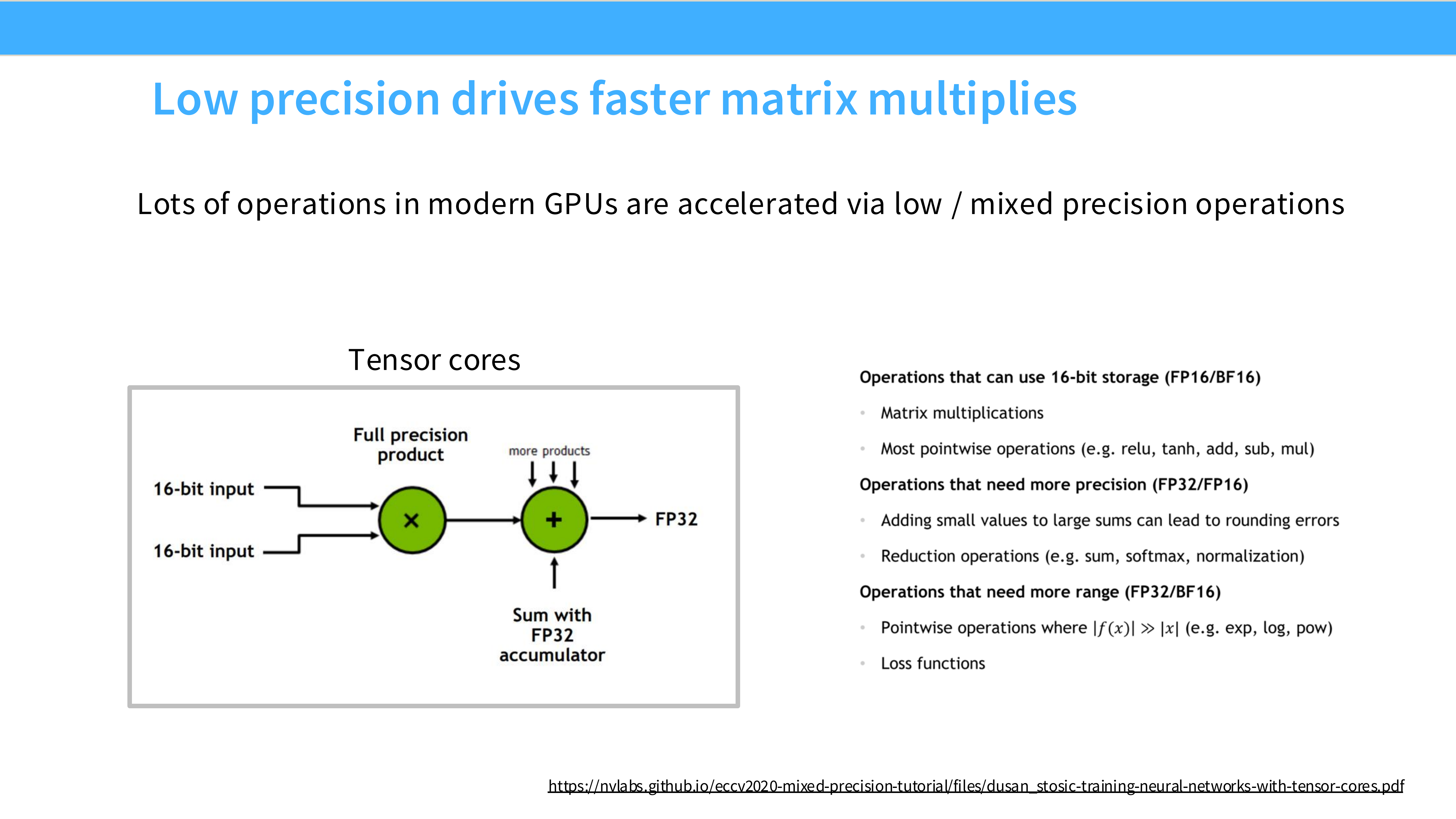
- 内容解析:
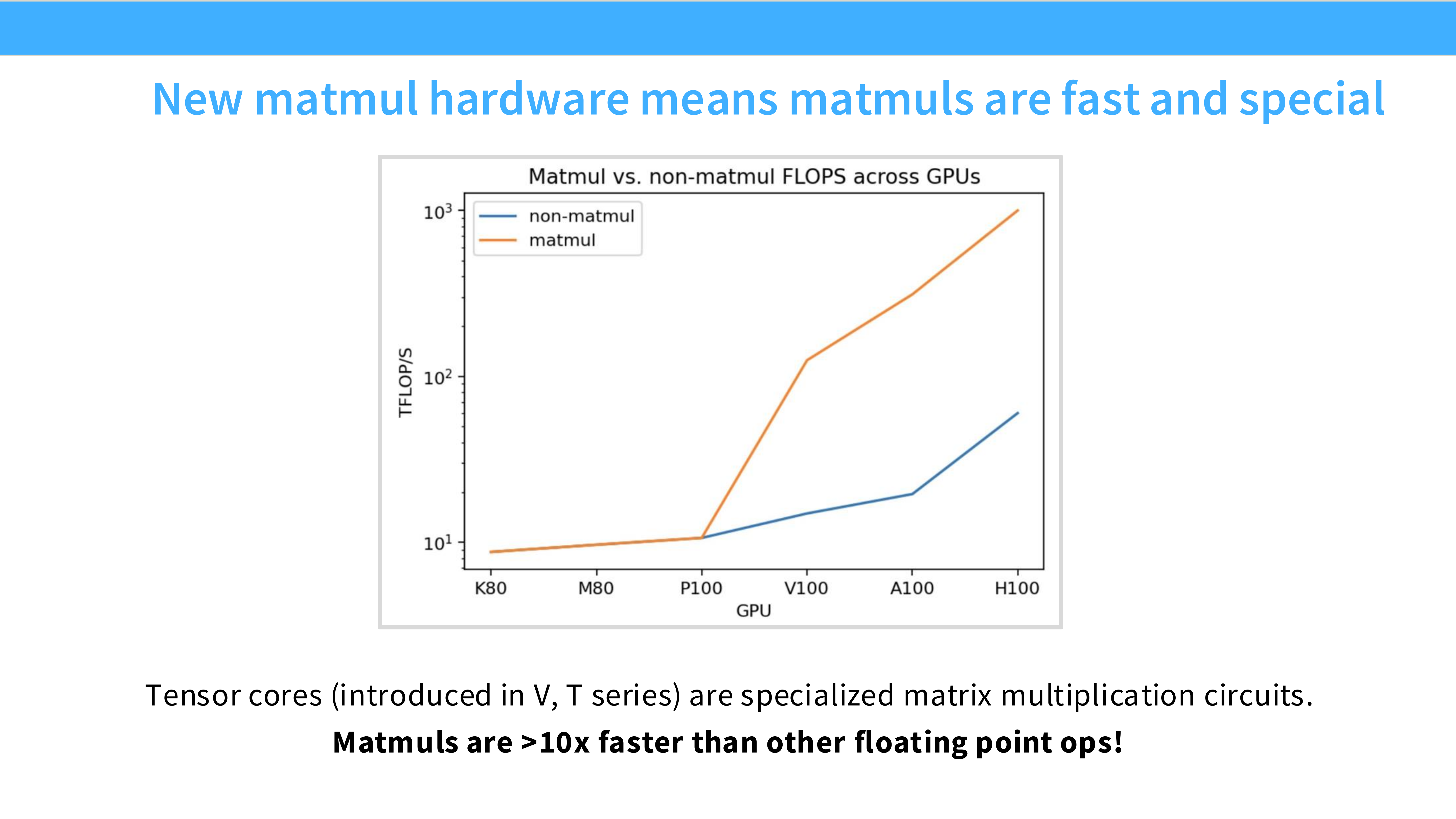
- 定义: 现代 GPU (Volta+) 引入的专用电路,专门用于加速矩阵乘法 ($D = A \times B + C$)。
- 威力: 在混合精度下,Tensor Cores 的吞吐量是普通 CUDA Cores 的 10 倍以上。
- 影响: 这让矩阵乘法变得极快,使得非矩阵操作(如 Softmax, LayerNorm)更容易成为性能瓶颈。
Page 18: 技巧 2 - 算子融合 (Operator Fusion)
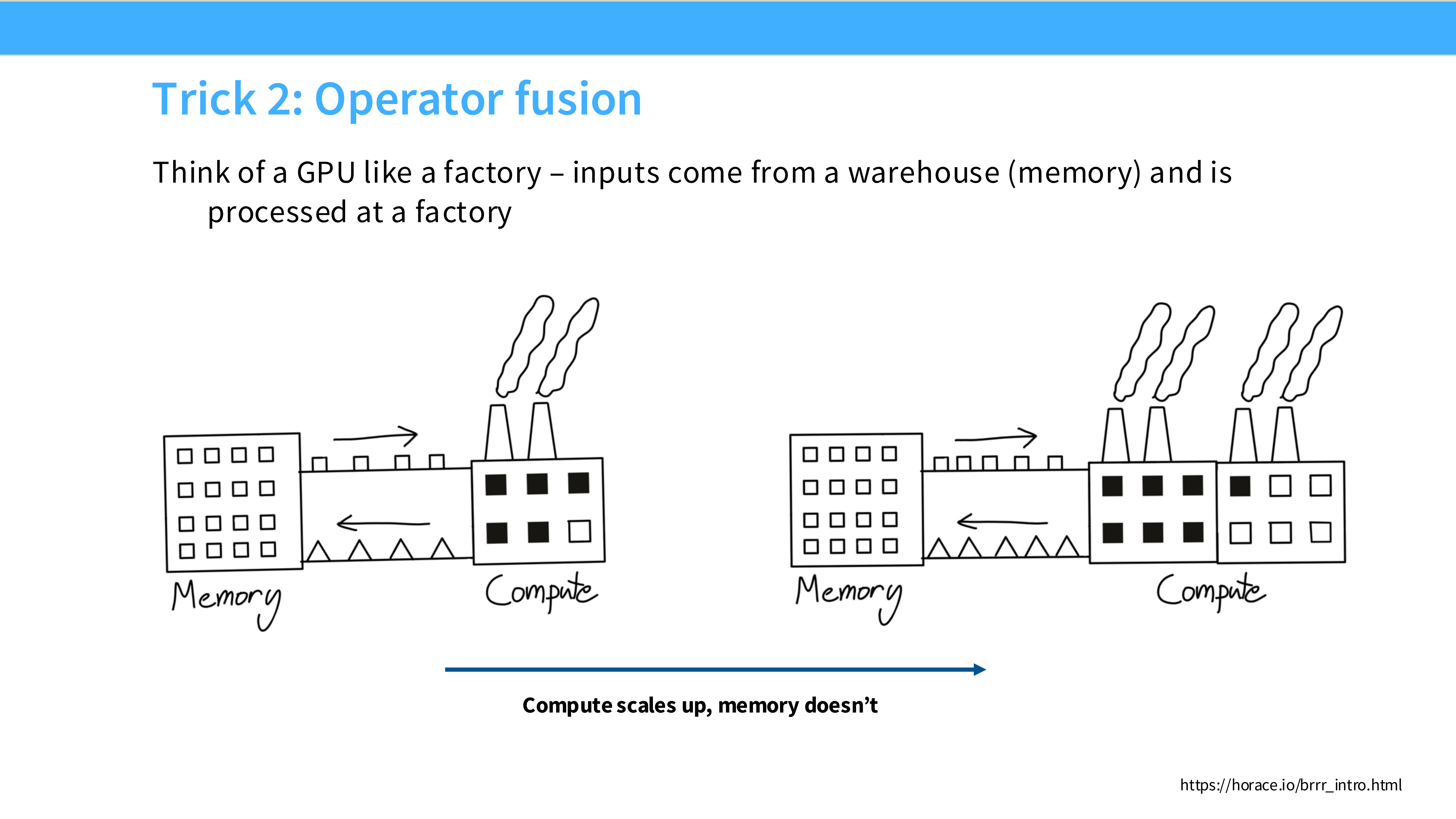
- 内容解析:
- 左图 (无融合): 像一个低效的工厂。每做一步(Add, Mul),都要把产品运回仓库(显存),再运回来做下一步。
- 右图 (融合): 流水线作业。数据读入寄存器后,一次性完成一系列计算(Add + Mul + Relu),最后只写回一次。
- 核心: 最小化 HBM 的读写次数。
Page 19: 融合的内存视角
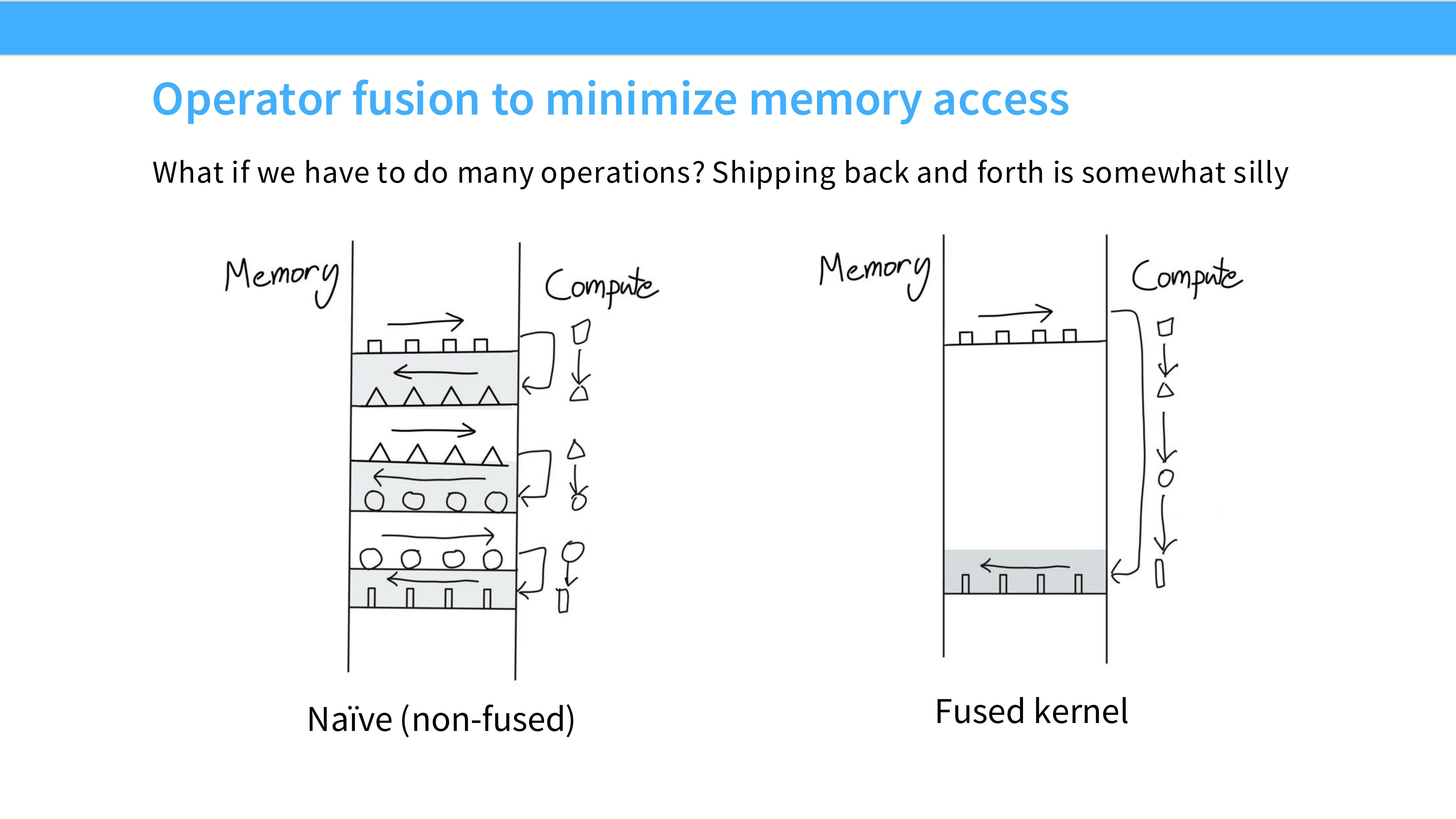
- 内容解析: 对比图解。
- Naive: 多个 Kernel 串行,中间结果频繁读写 HBM,带宽压力大。
- Fused Kernel: 一个 Kernel 完成所有工作,中间结果在寄存器或 Shared Memory 中传递,极其高效。
Page 20: 融合案例 - Sin/Cos
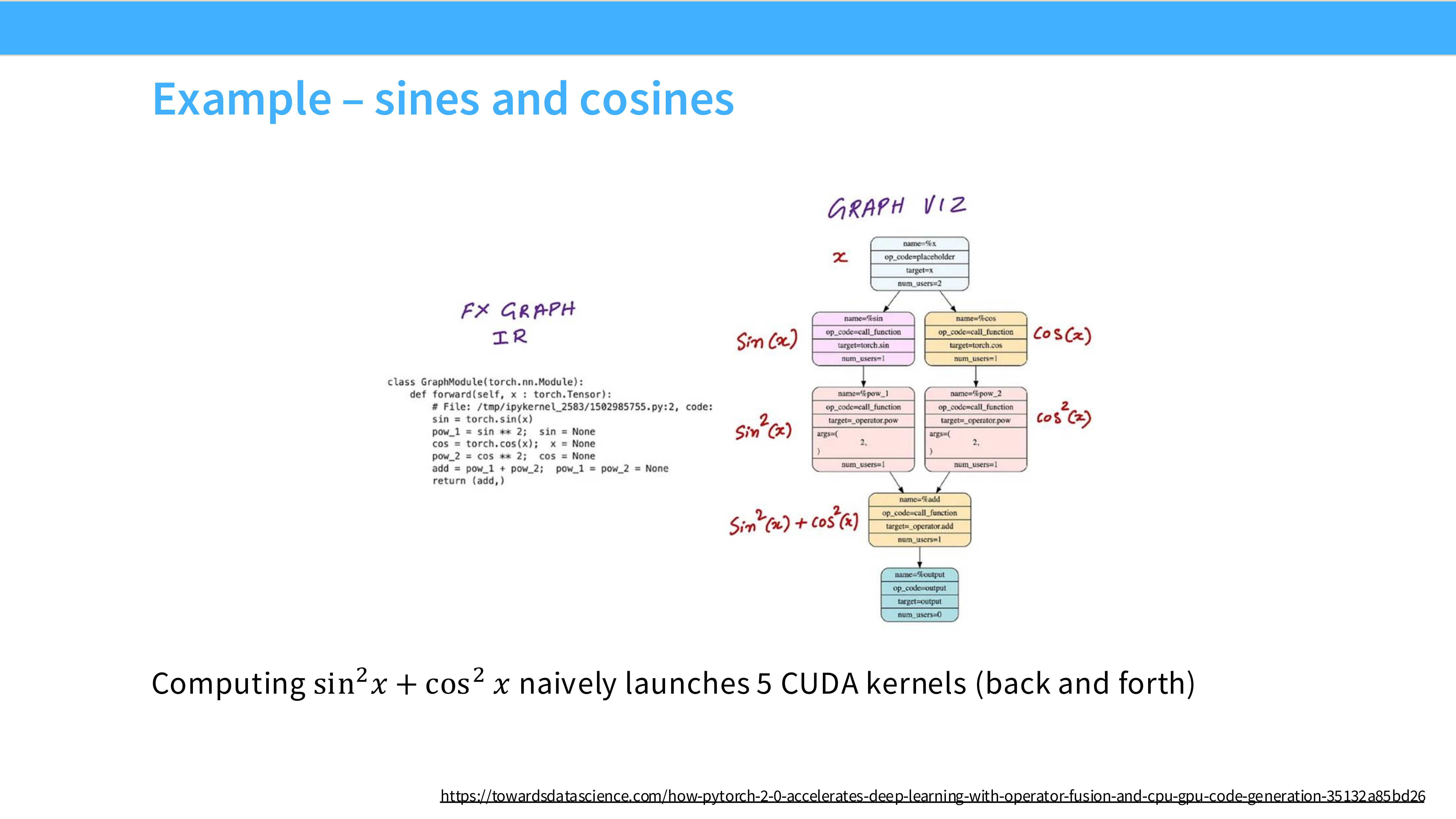
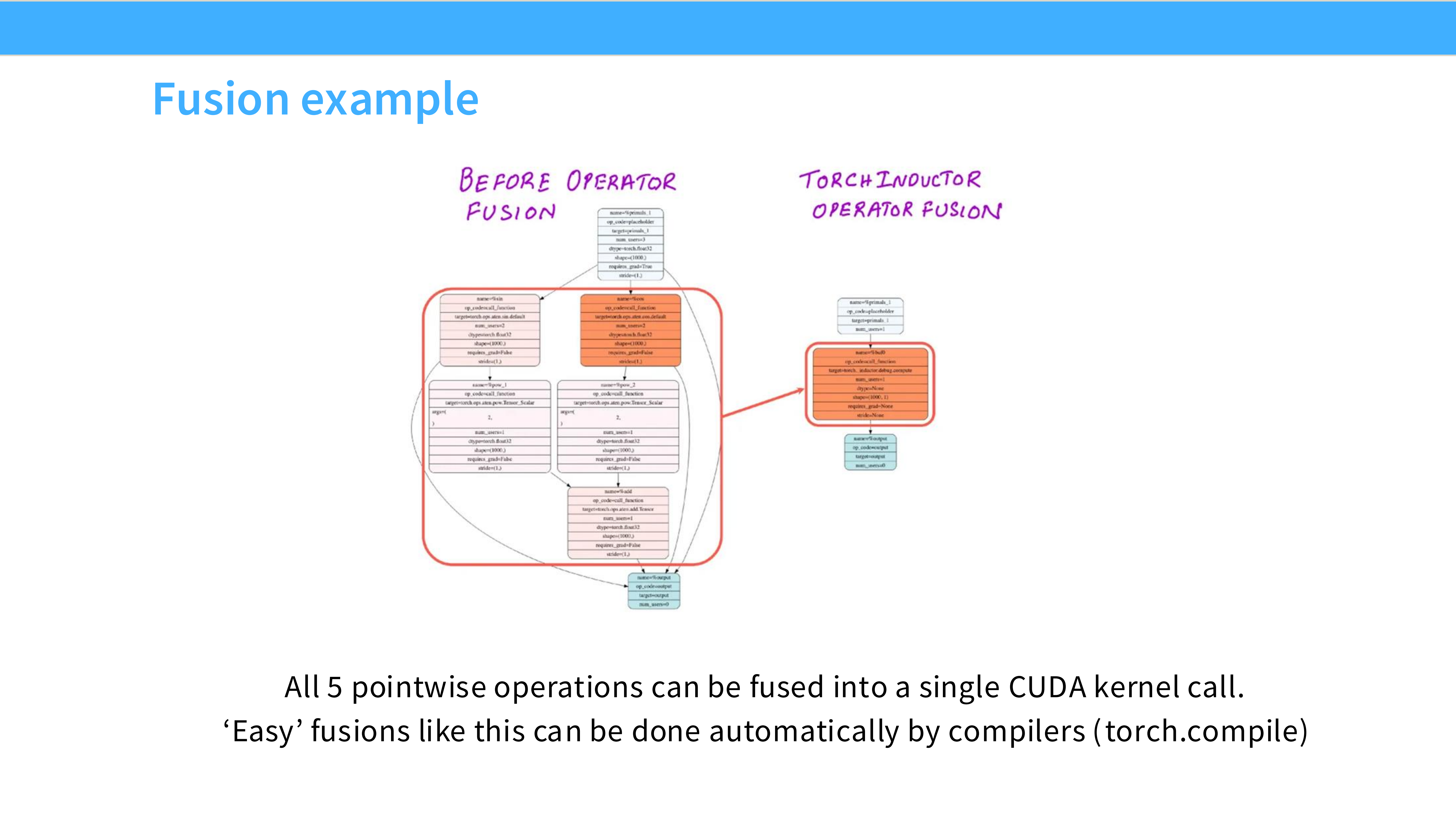
- 内容解析: 计算 $\sin^2(x) + \cos^2(x)$。
- 如果不融合,需要启动 5 个 Kernel,反复搬运数据。
- 融合后,只需 1 个 Kernel,数据只读写一次。
Page 21: 编译器自动融合
- 内容解析:
- TorchInductor: PyTorch 2.0 的编译器。它可以自动分析计算图,将多个 Pointwise 操作“融合”成一个单一的 CUDA Kernel,无需手写 CUDA 代码。
Page 22: 技巧 3 - 重计算 (Recomputation)
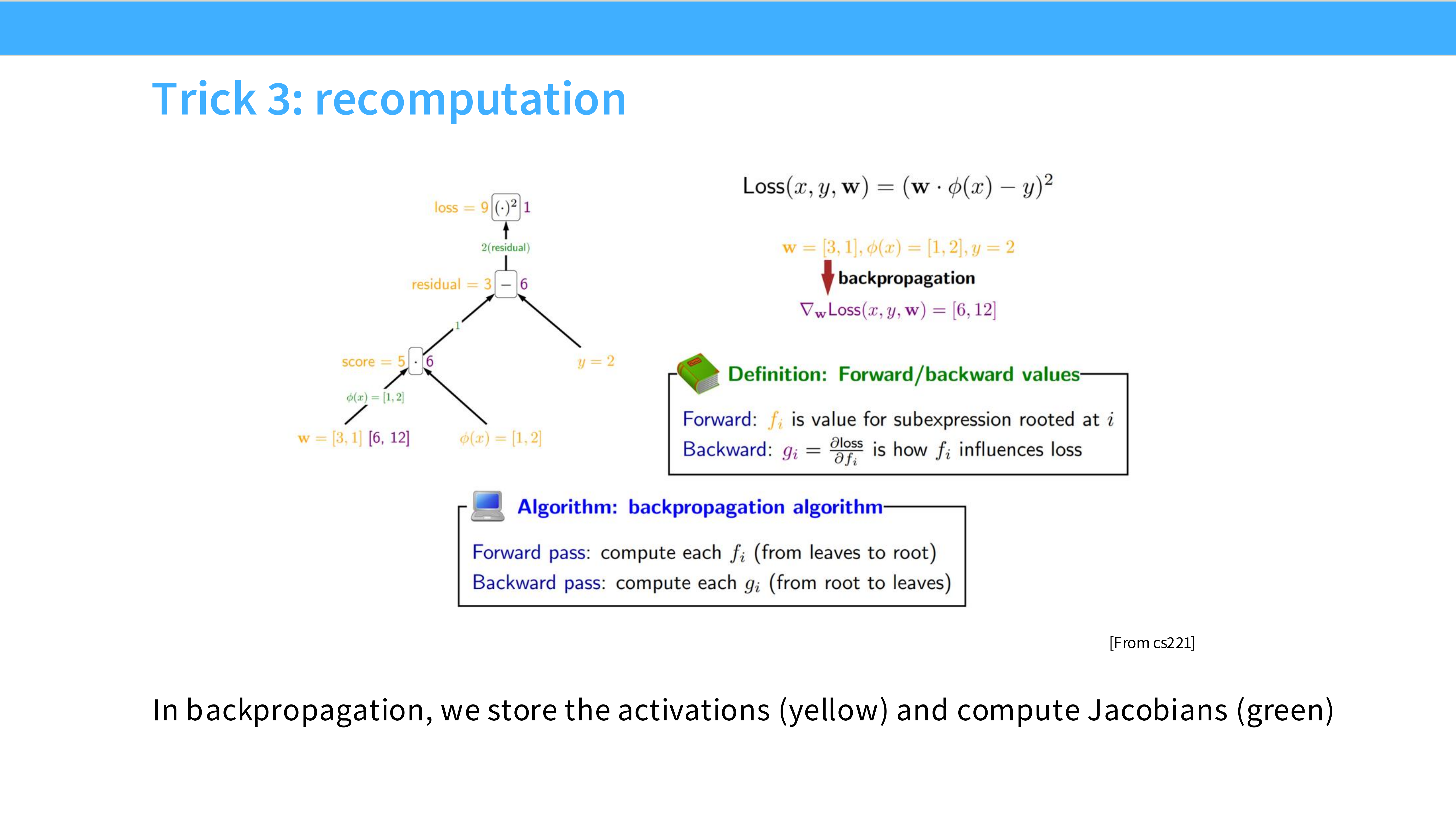
- 内容解析:
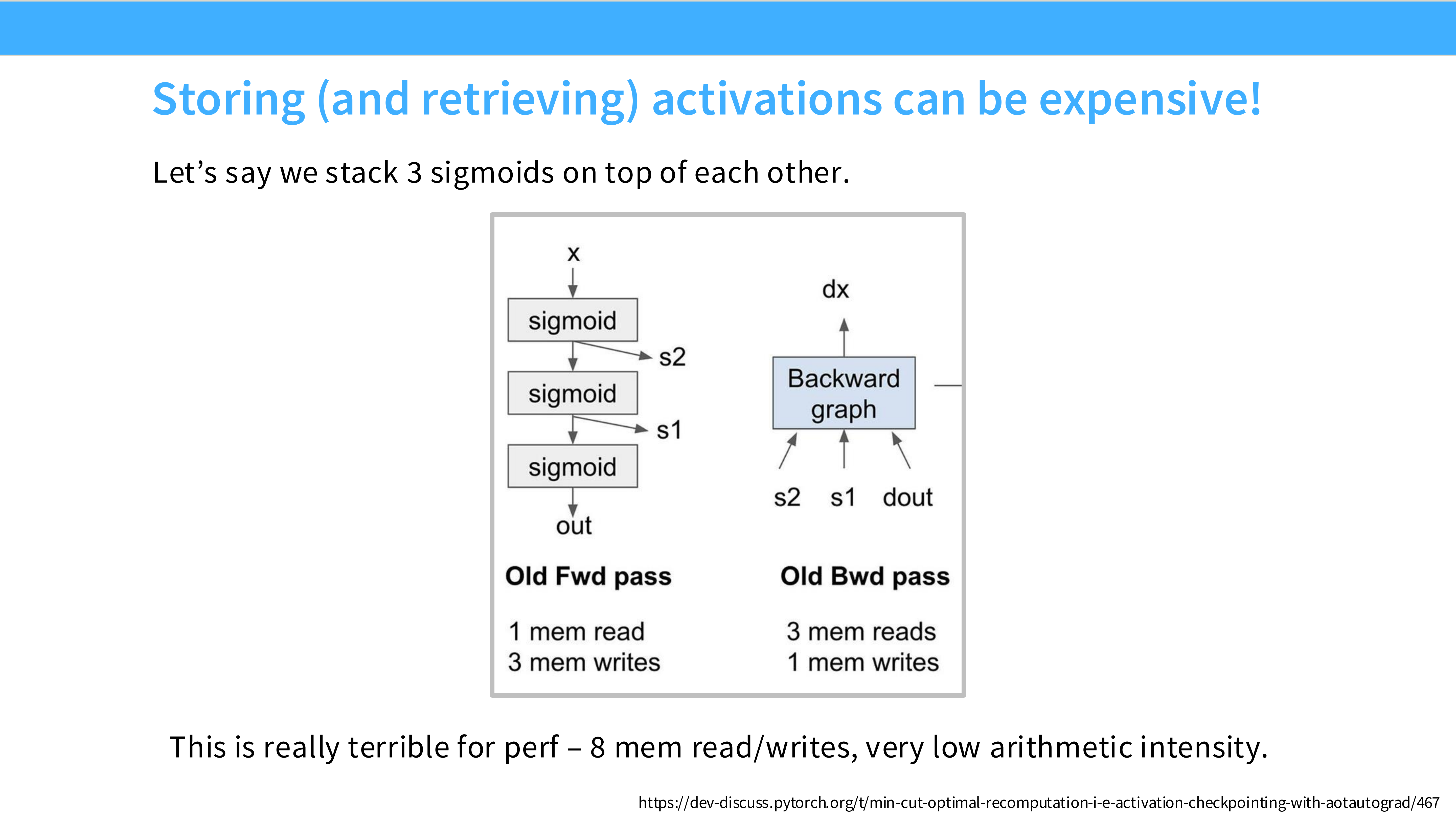
- 问题: 显存不够存下所有激活值(Activations)。
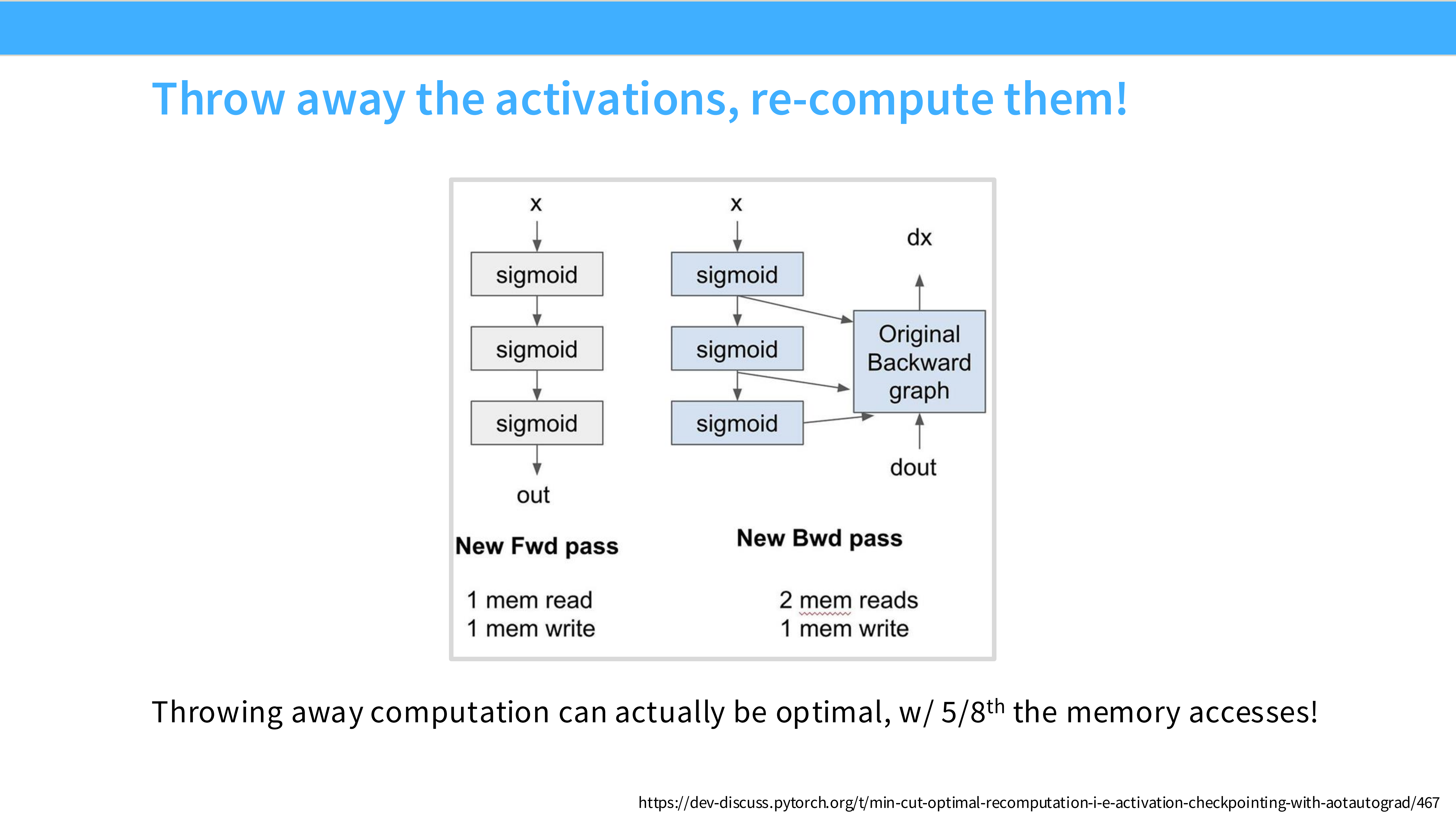
- 策略: Throw away the activations, re-compute them! 在反向传播时,不读取缓存的激活值,而是重新计算一遍。
- 逻辑: 因为 Compute (FLOPs) 很便宜且快,Memory (HBM) 很贵且慢。在 Memory Bound 场景下,重计算往往比去 HBM 读数据还要快。
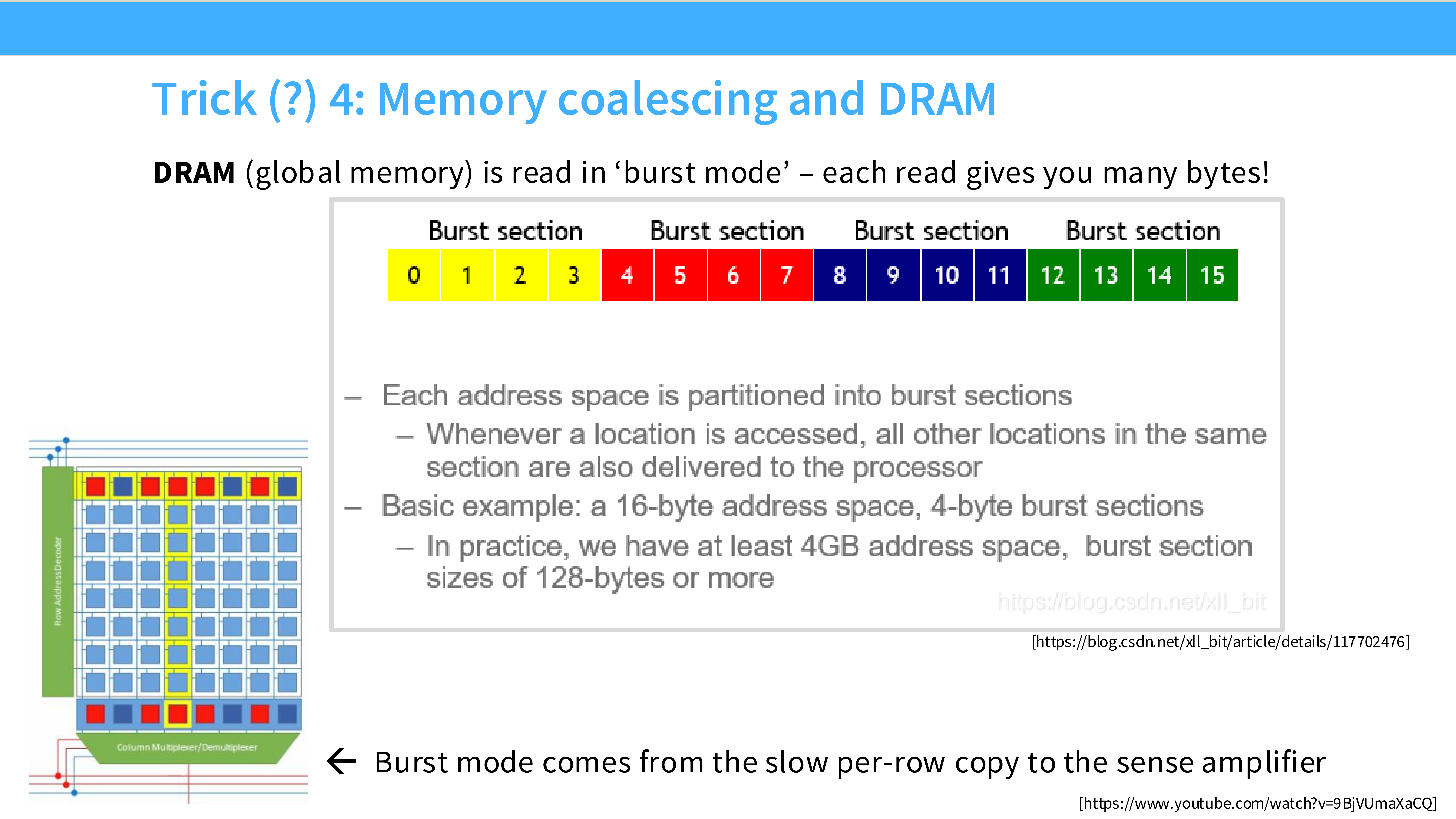
Page 23: 技巧 4 - 内存合并 (Memory Coalescing)
- 内容解析:
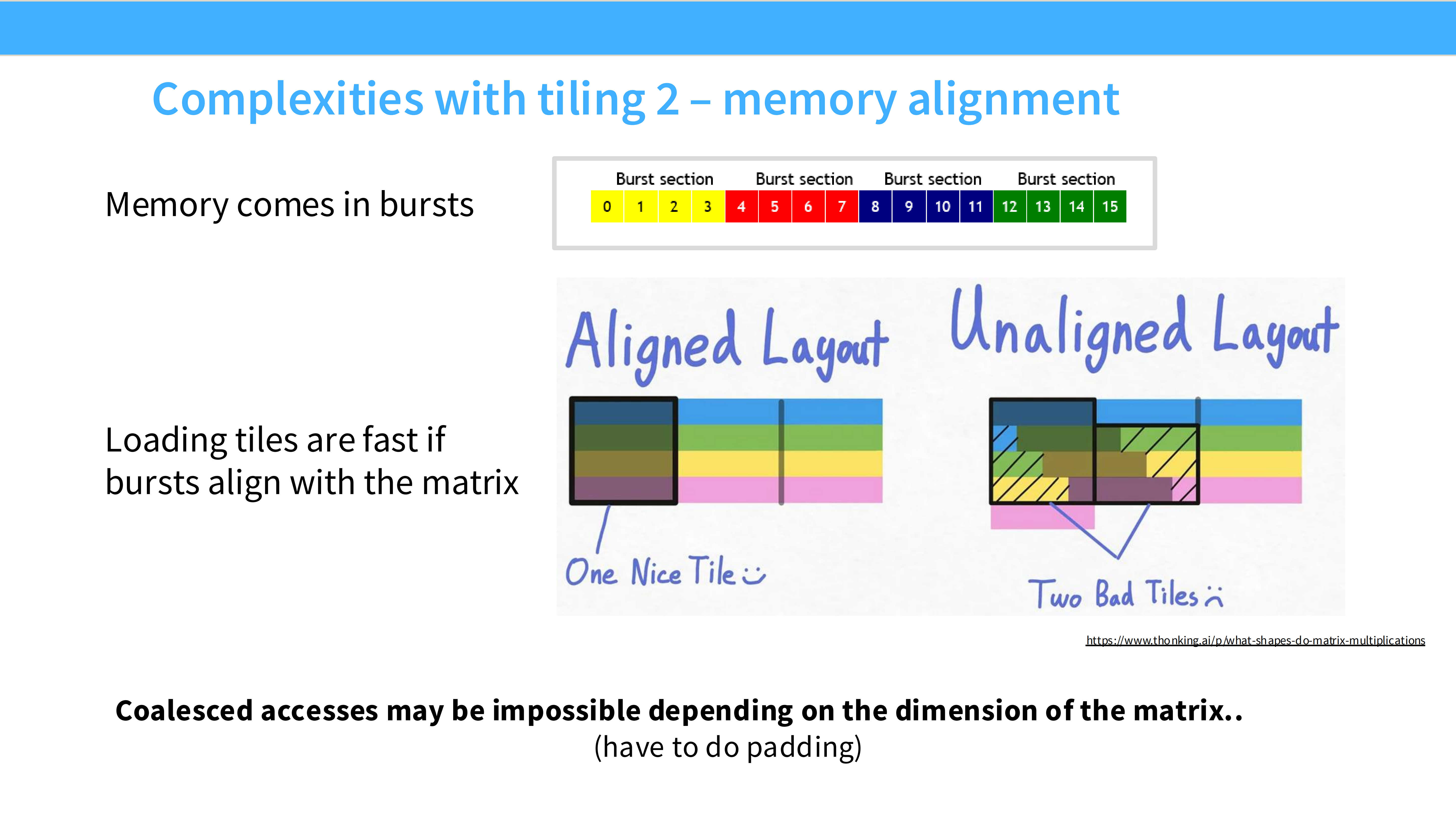
- DRAM 特性: 内存读取是 Burst Mode(爆发模式)。即使你只请求 1 个字节,DRAM 也会发给你一块连续数据(例如 128 字节)。
- 隐喻: 就像快递,不会送一根牙签,至少是一个盒子。
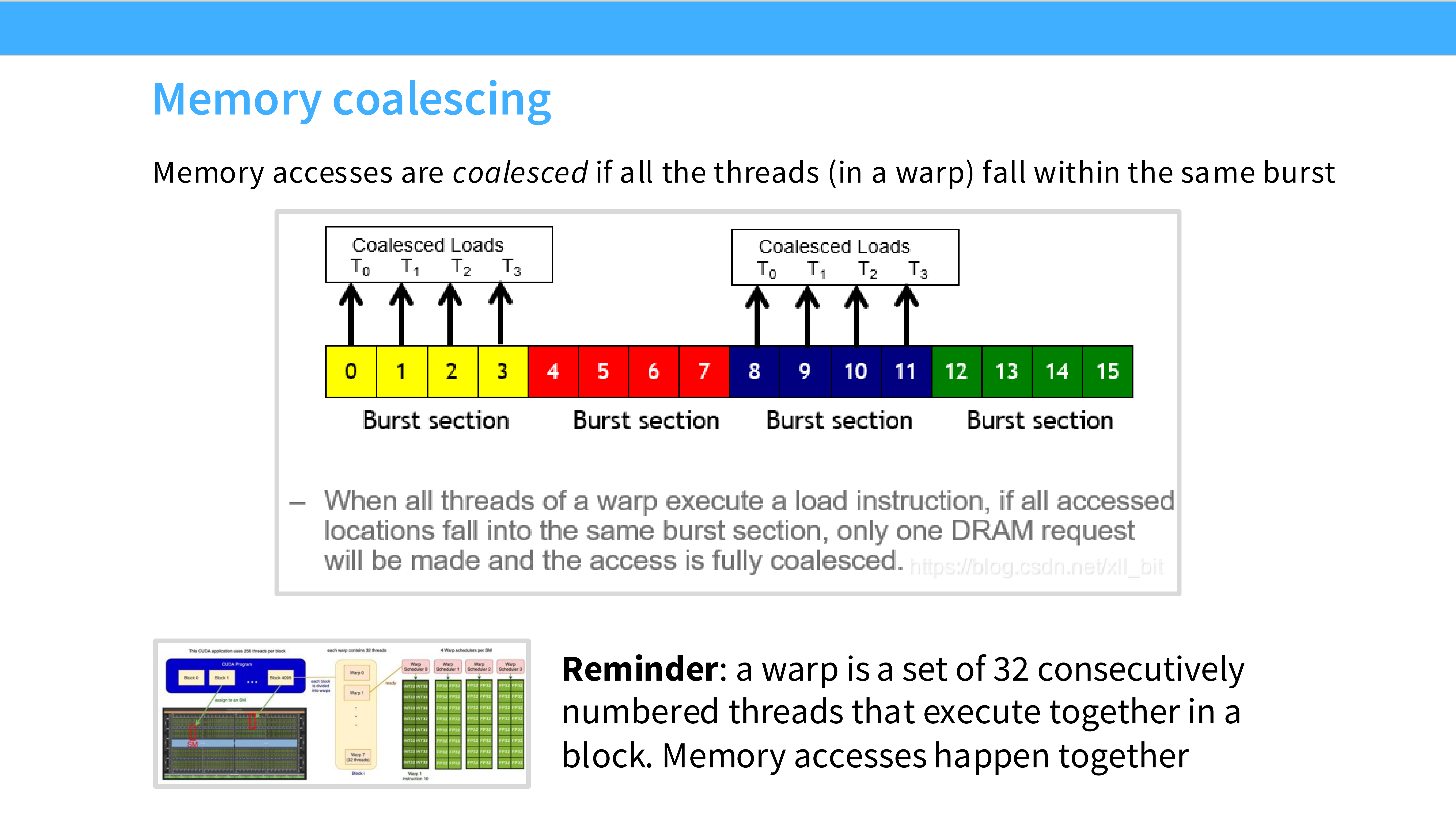
Page 24: 什么是 Coalesced Loads
- 内容解析:
- 图示: 线程 0-15 依次访问地址 0-15。
- 效果: 硬件将这 16 个请求合并为 1 个 内存事务。这是最高效的访问模式。
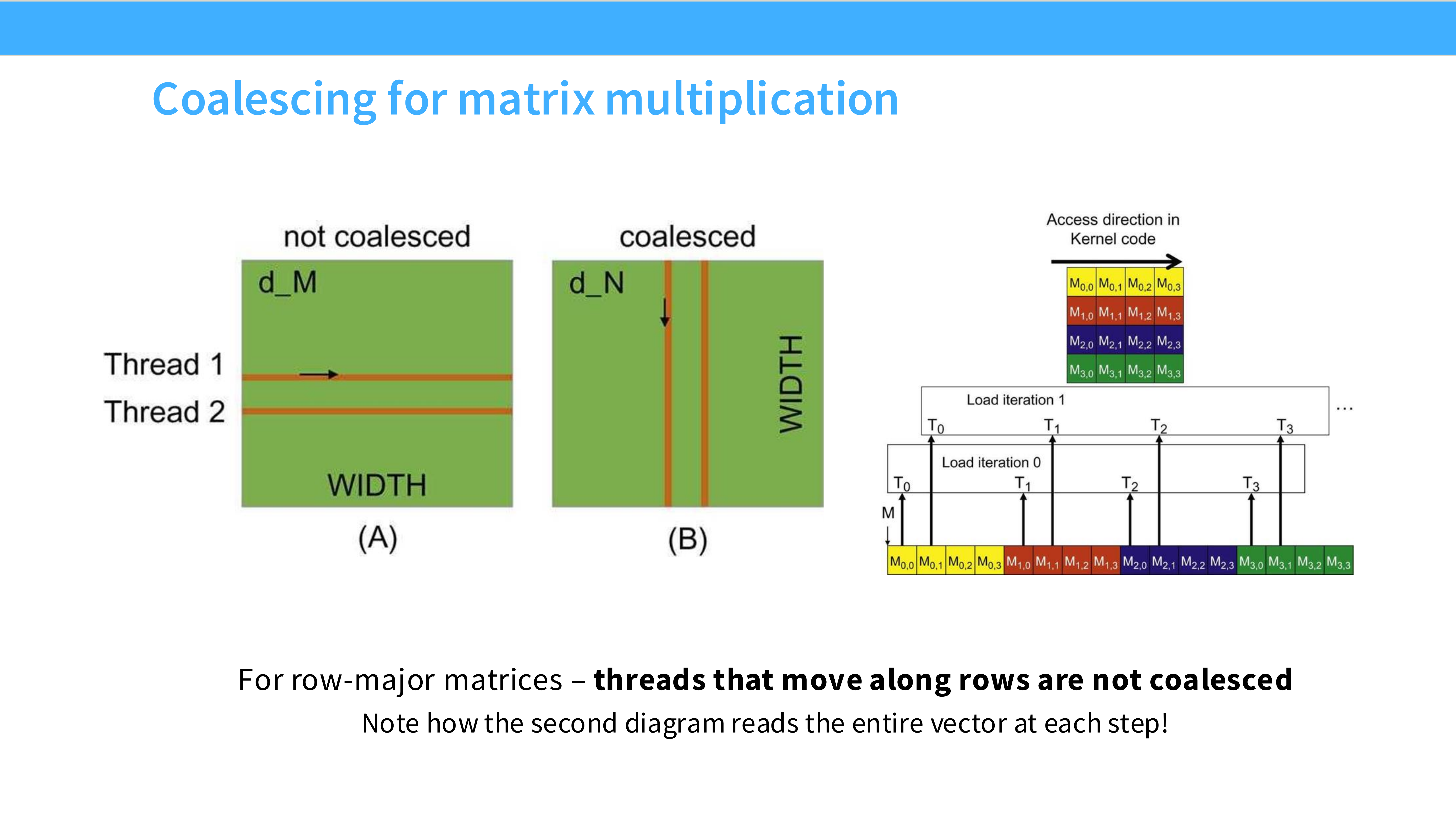
Page 25: 未合并的代价
- 内容解析:
- 左图 (Unaligned/Strided): 线程跳跃访问。为了读几个有用数据,不得不触发多次 Burst,传输了大量无用的红色数据块。带宽浪费严重。
- 右图 (Aligned): 高效利用带宽。
- 总结: “One Nice Tile vs Two Bad Tiles”。
Page 26: 控制流分歧 (Control Divergence)
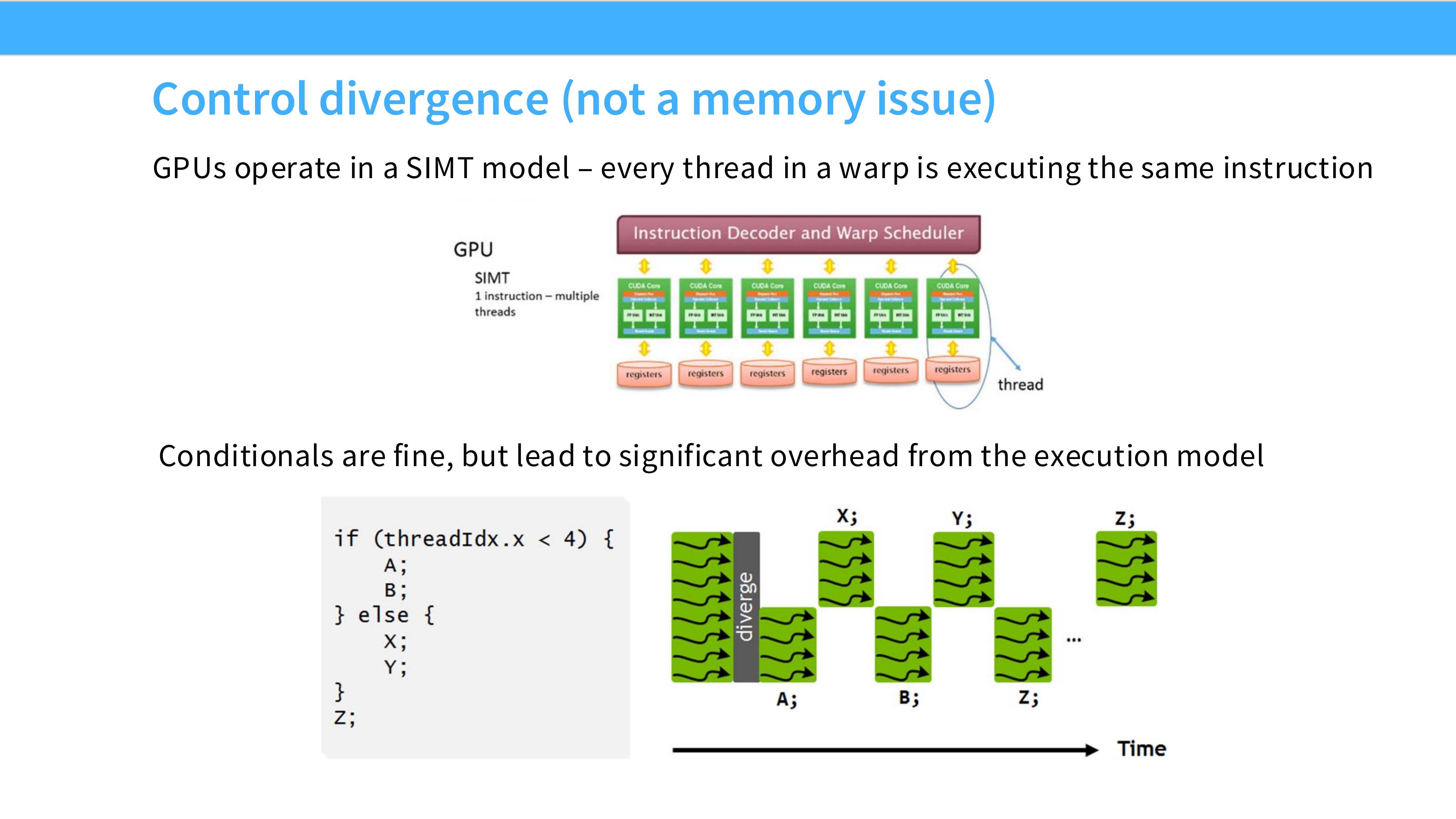
- 内容解析:
- 问题: 代码中有
if-else。 - 机制: 由于 SIMT 特性,如果 Warp 内部分线程走
if,部分走else,硬件会串行化执行——先跑if(另一半线程空转等待),再跑else。 - 影响: 这不是内存问题,而是并行效率问题,会导致算力利用率减半。
- 问题: 代码中有
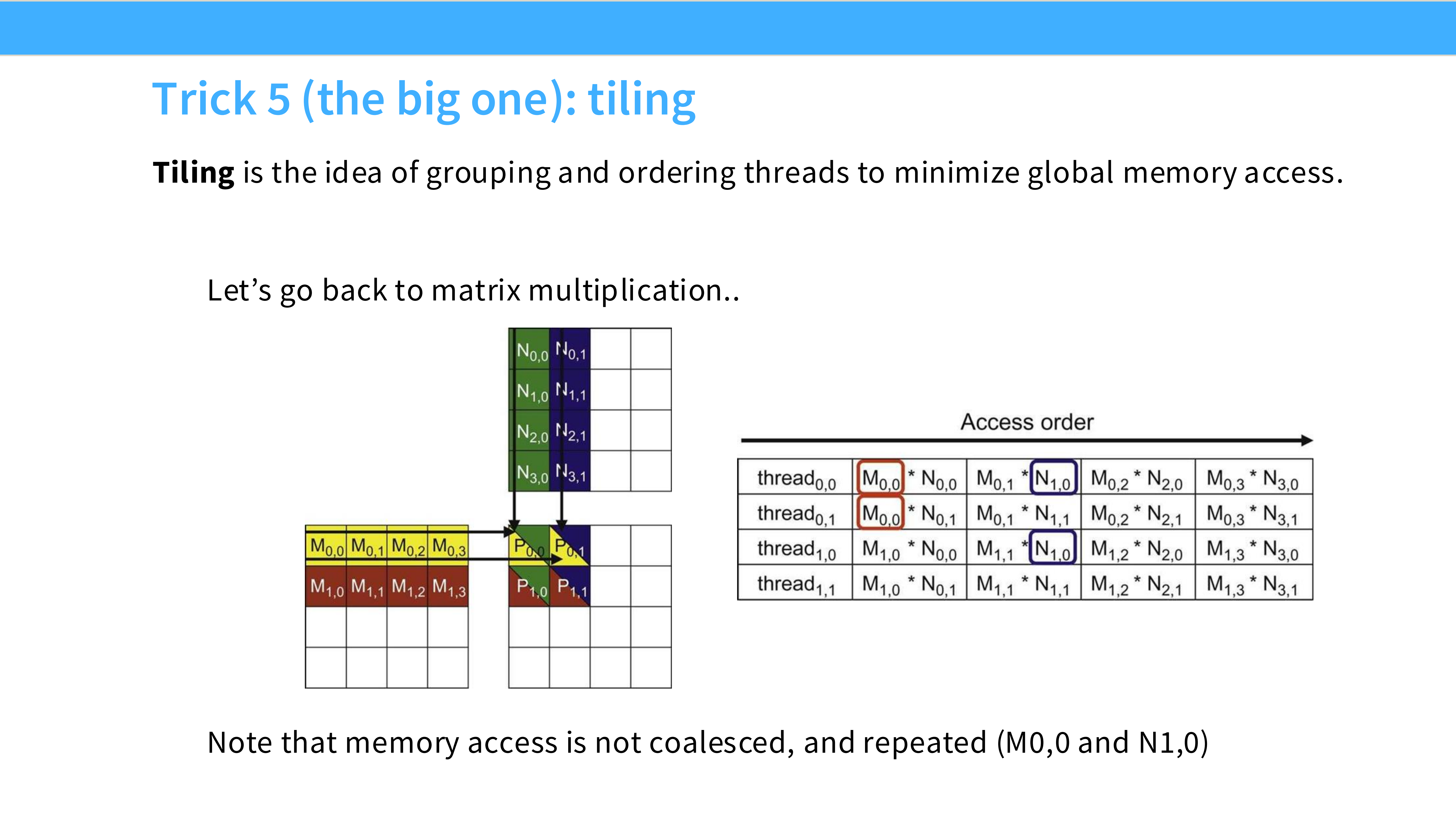
Page 27: 技巧 5 - 分块 (Tiling) [最重要]
- 内容解析:
- 概念: 将大矩阵切分成小块(Tiles)。
- 目的: 利用 Shared Memory (SRAM) 这种高速片上内存。将小块数据加载到 SRAM,让线程反复在 SRAM 上读取数据进行计算,从而减少对慢速 HBM 的访问。
Page 28: Tiling 的数学原理
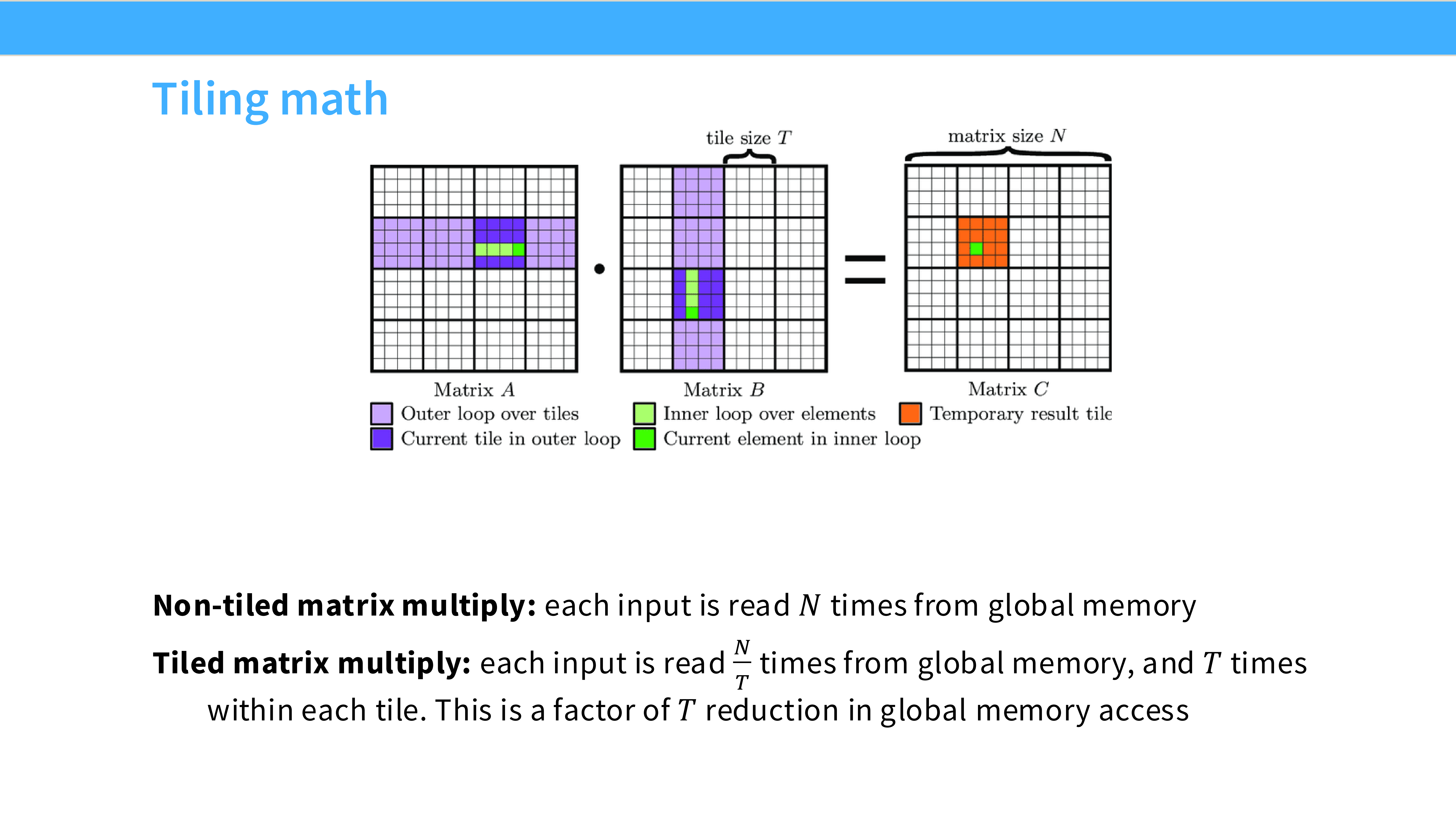
- 内容解析:
- Non-tiled: 计算 $C$ 的每个元素都要从 HBM 读取 $A$ 的一行和 $B$ 的一列。每个数据被重复从 HBM 读取 $N$ 次。
- Tiled: 每个数据只从 HBM 读取 $N/T$ 次($T$ 是 Tile 大小)。
- 收益: 内存访问量减少了 $T$ 倍。这是矩阵乘法高效的根本原因。
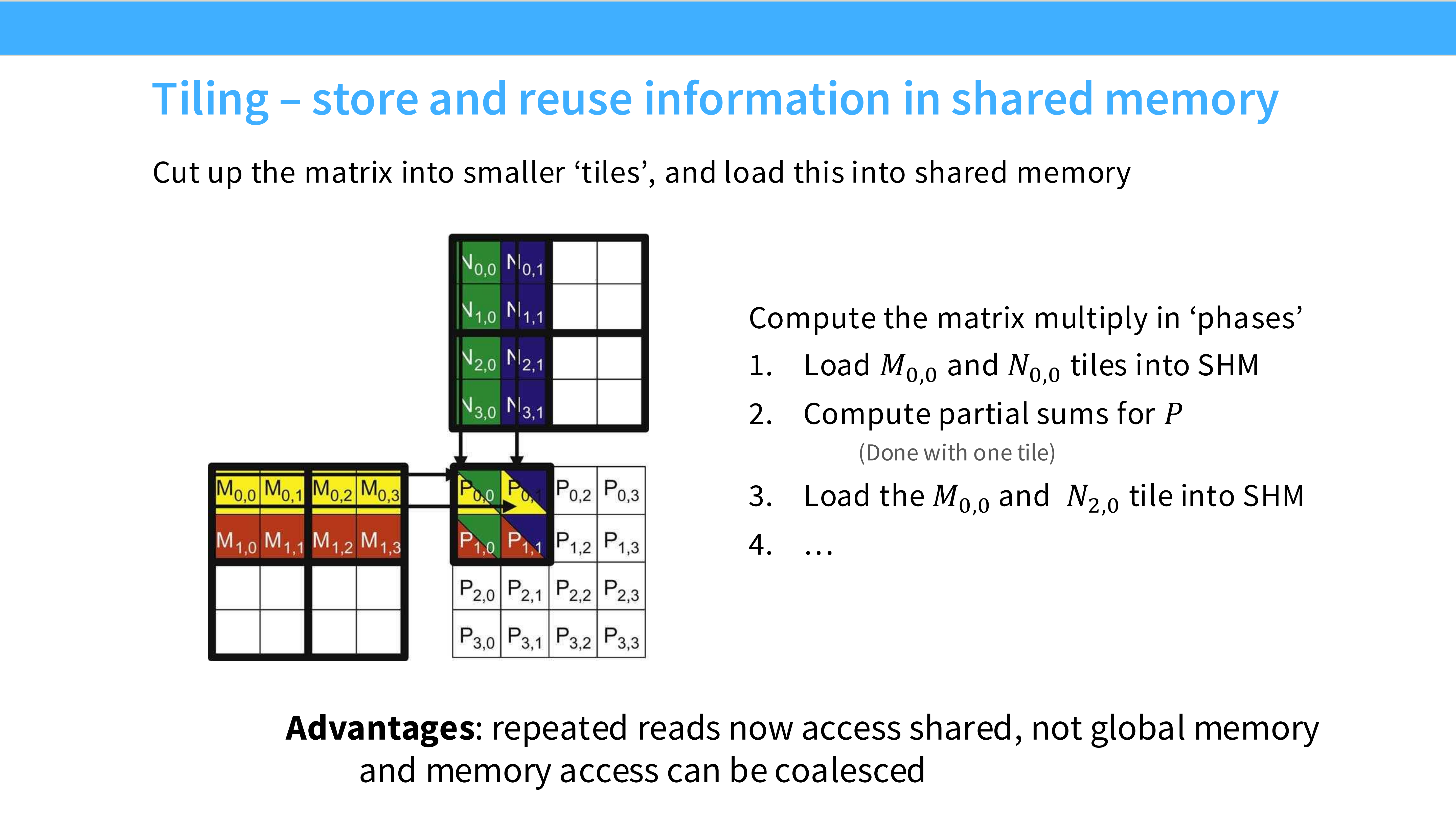
Page 29: Tiling 与 Shared Memory
- 内容解析: 流程演示:
- 协作将 $M_{0,0}$ 和 $N_{0,0}$ 块从 HBM 加载到 Shared Memory。
- 线程在 Shared Memory 上进行高速计算。
- 加载下一块。
- 通过这种方式,大部分内存访问都发生在高速的 SRAM 上。
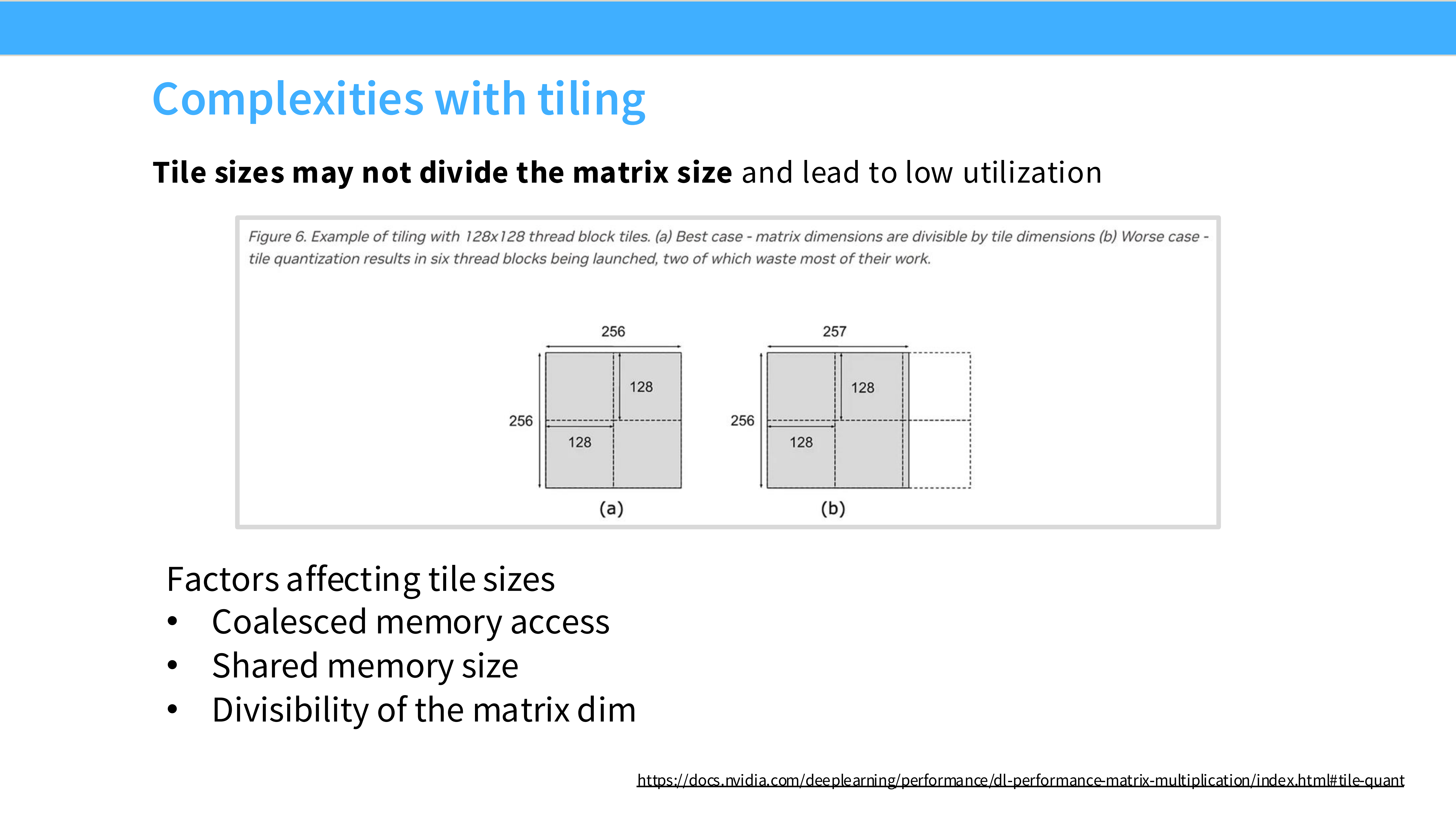
Page 30: Tiling 的复杂性 1 - 边界问题
- 内容解析:
- 如果矩阵大小不能被 Tile 大小整除,边缘会多出一部分。
- 需要处理 Padding 或者在代码中加 边界检查,这会导致利用率下降(部分线程空转)。
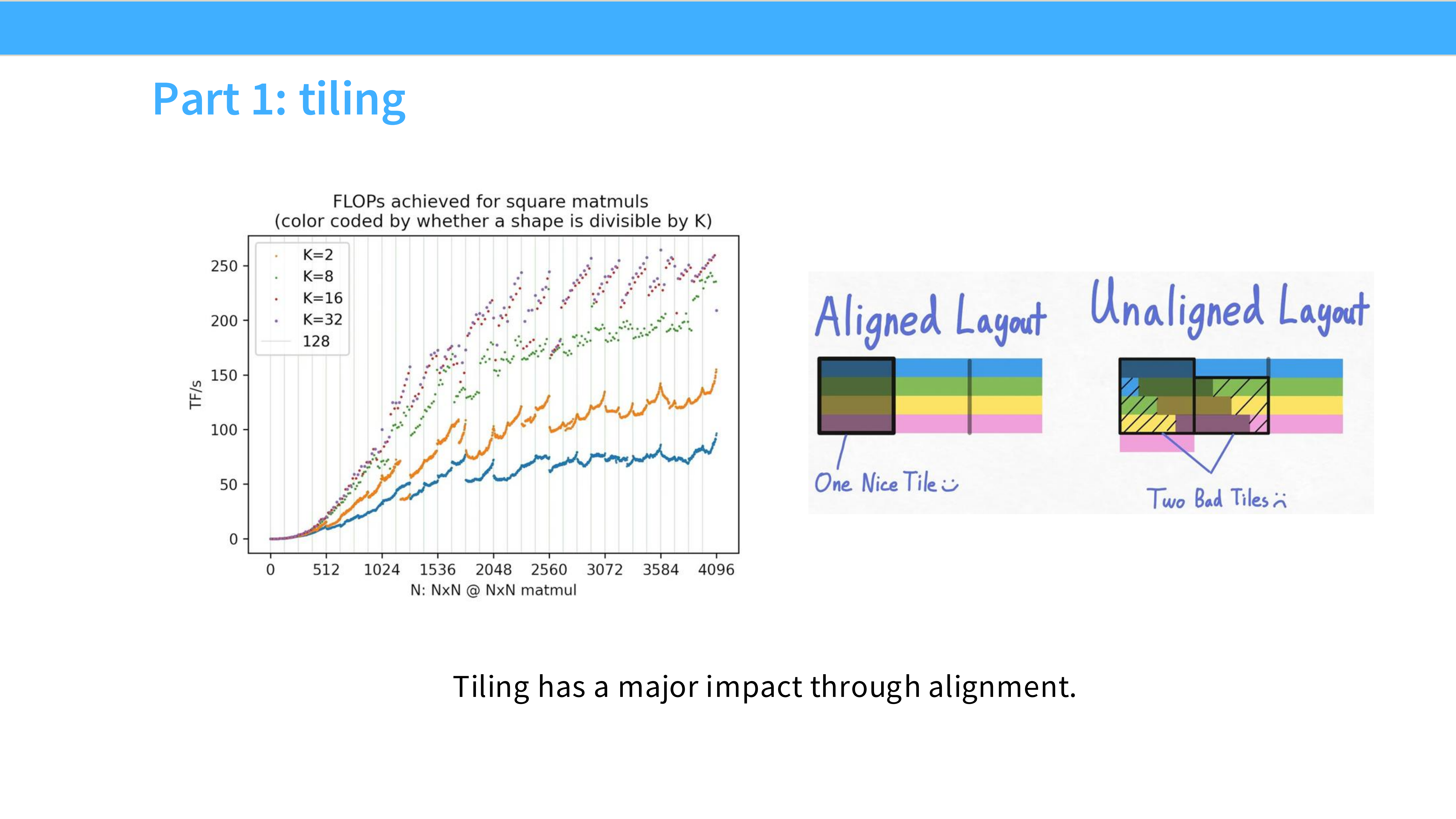
Page 31: Tiling 的复杂性 2 - 对齐问题
- 内容解析:
- Aligned: 完美对齐,利用 Coalescing。
- Unaligned: 数据起始位置未对齐,导致一次 Tile 读取需要跨越多个内存块,带宽减半。
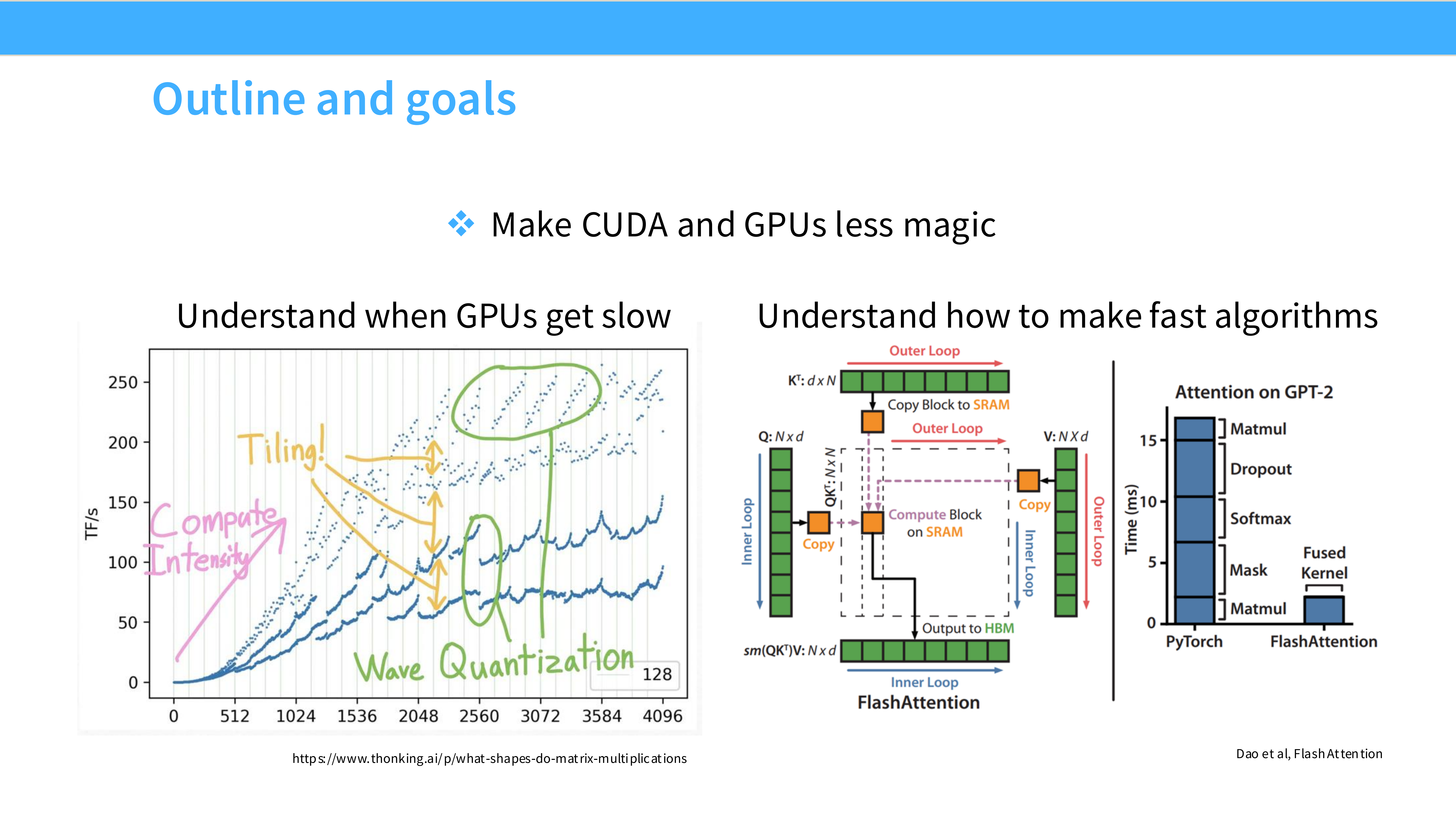
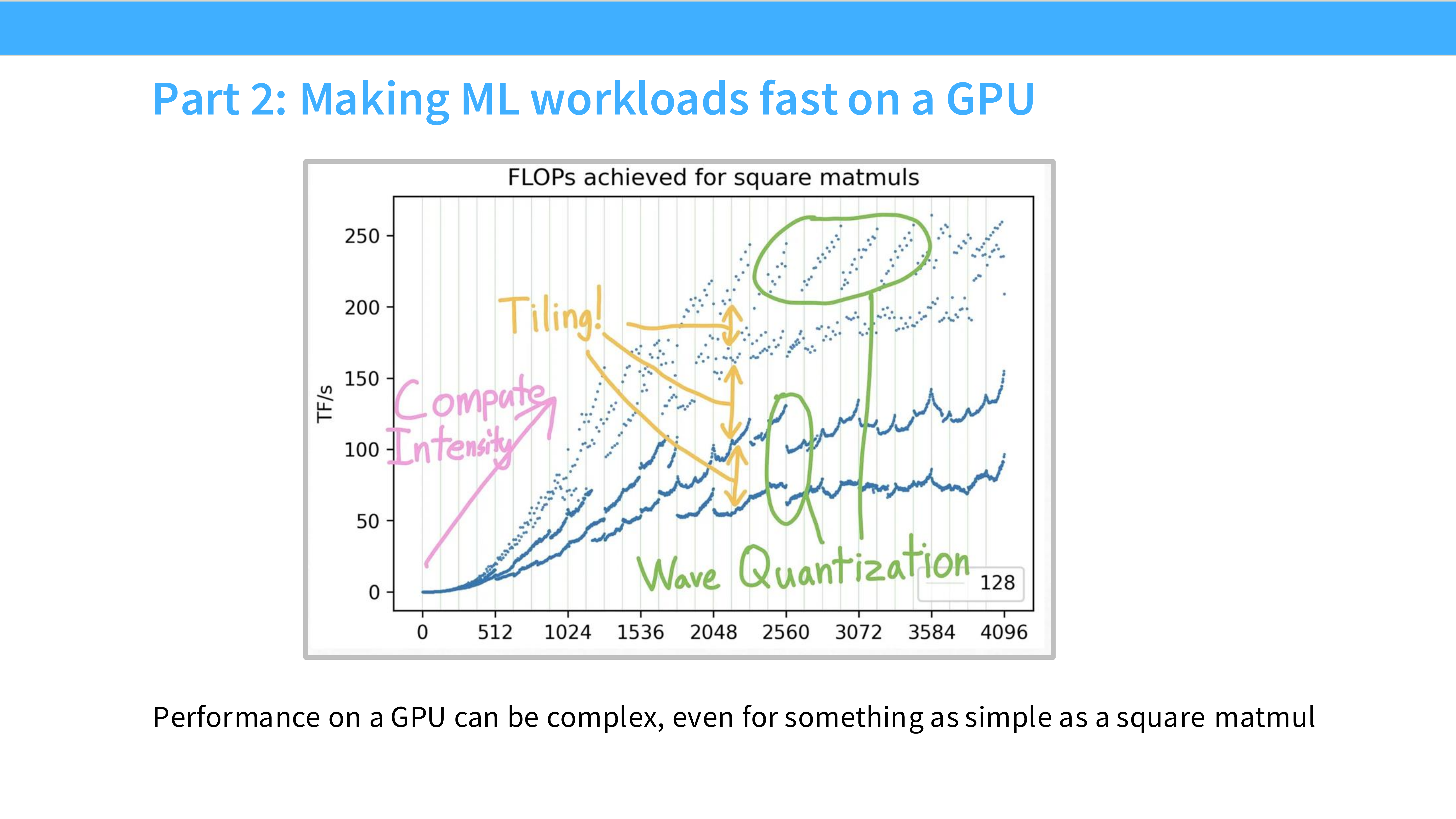
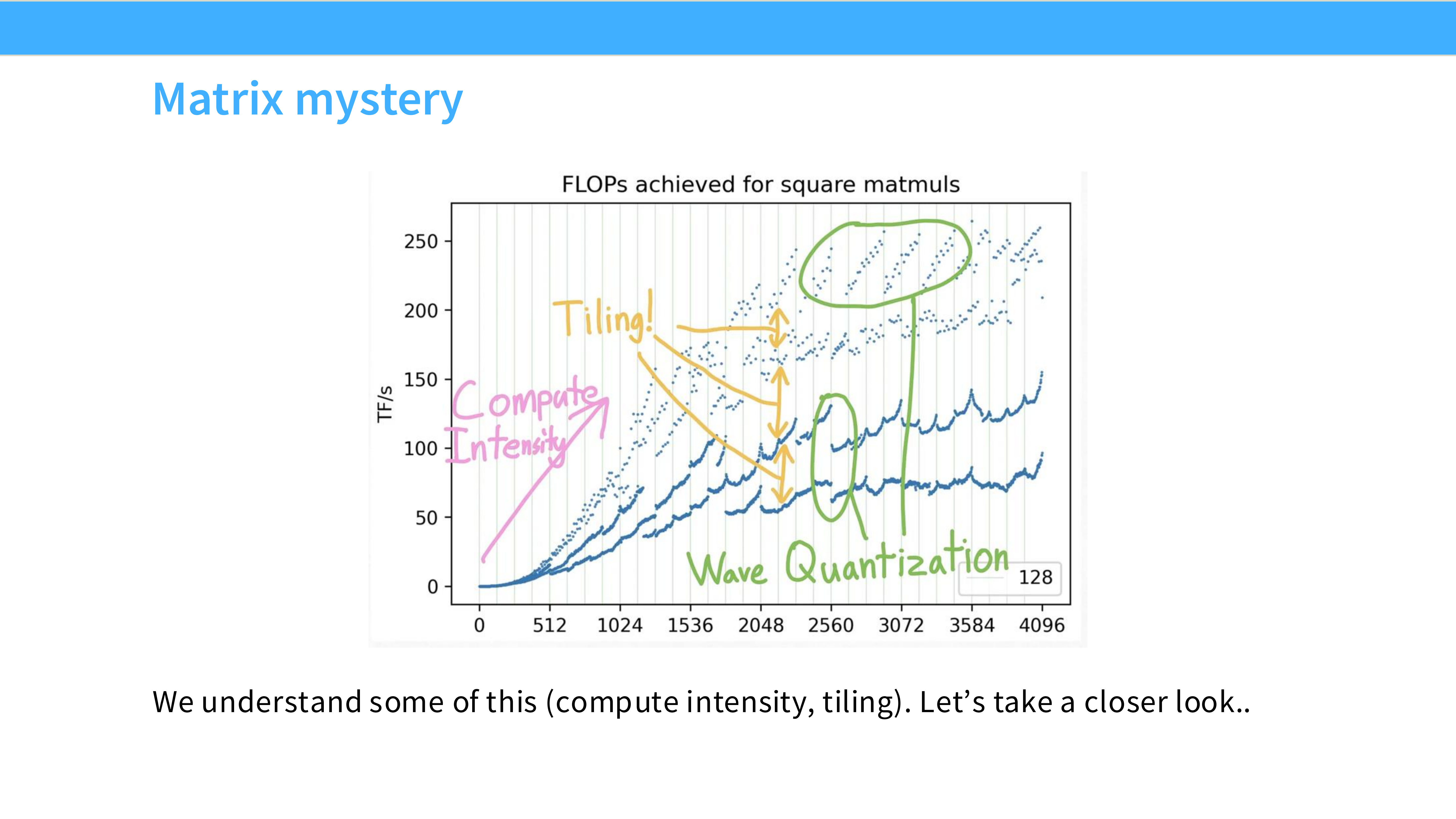
Page 32: 矩阵性能之谜
- 内容解析: 展示了一个锯齿状的性能曲线。为什么矩阵大小从 2048 增加到 2049,性能会突然下降?
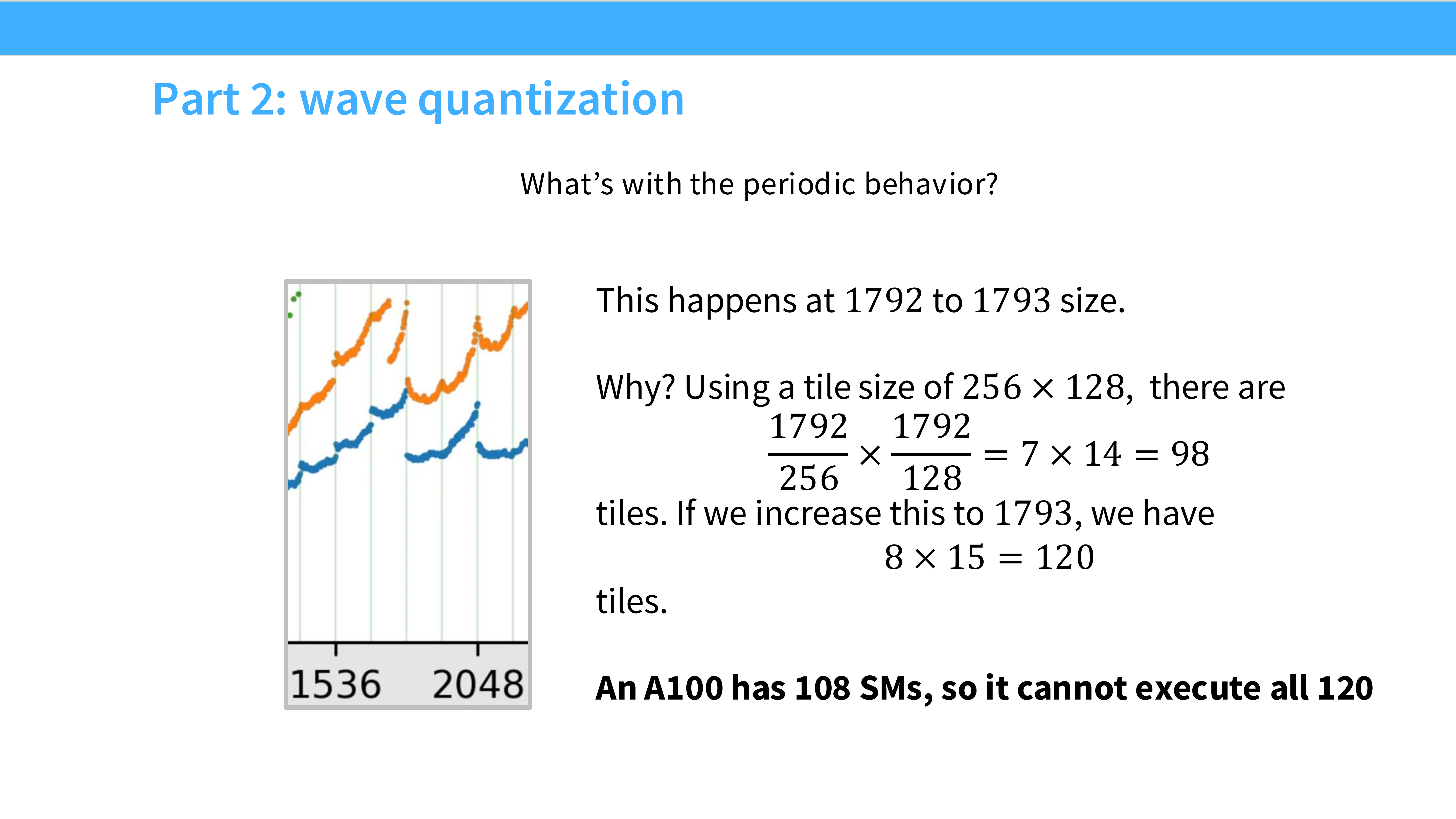
Page 33: 波浪量化 (Wave Quantization)
- 内容解析: 解释了锯齿原因。
- GPU 的 SM 数量是固定的(如 108 个)。
- Wave Effect: 如果任务块数量是 108,GPU 刚好一波跑完,效率 100%。
- Tail Effect: 如果任务块是 109,前 108 个跑完后,剩下 1 个块还需要占用一整波的时间,此时 107 个 SM 是空闲的。
- 结论: 矩阵大小最好是 SM 数量的整数倍。
Page 34: 新一代硬件 (Matmuls are fast)
- 内容解析:
- 由于 Tensor Cores 的存在,矩阵乘法现在非常快(比其他操作快 10 倍)。
- 现在的瓶颈往往转移到了那些不能利用 Tensor Core 的操作上。
Page 35: 历史回顾
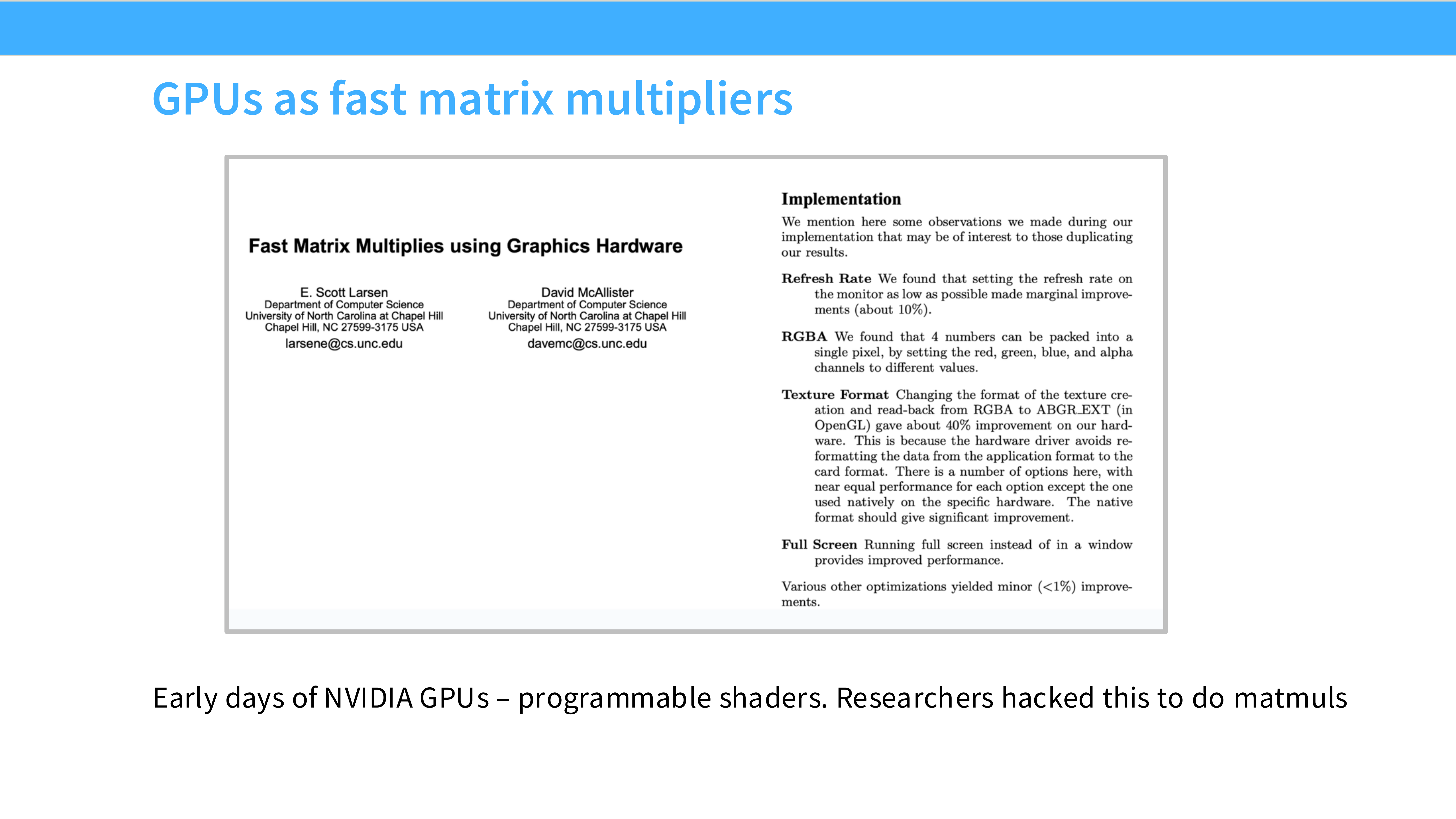
- 内容解析: 在 CUDA 出现之前,研究人员不得不把矩阵运算伪装成图形渲染任务(Graphics Hardware)来利用 GPU。现在我们有了专门的工具。
Page 36: Part 2 总结
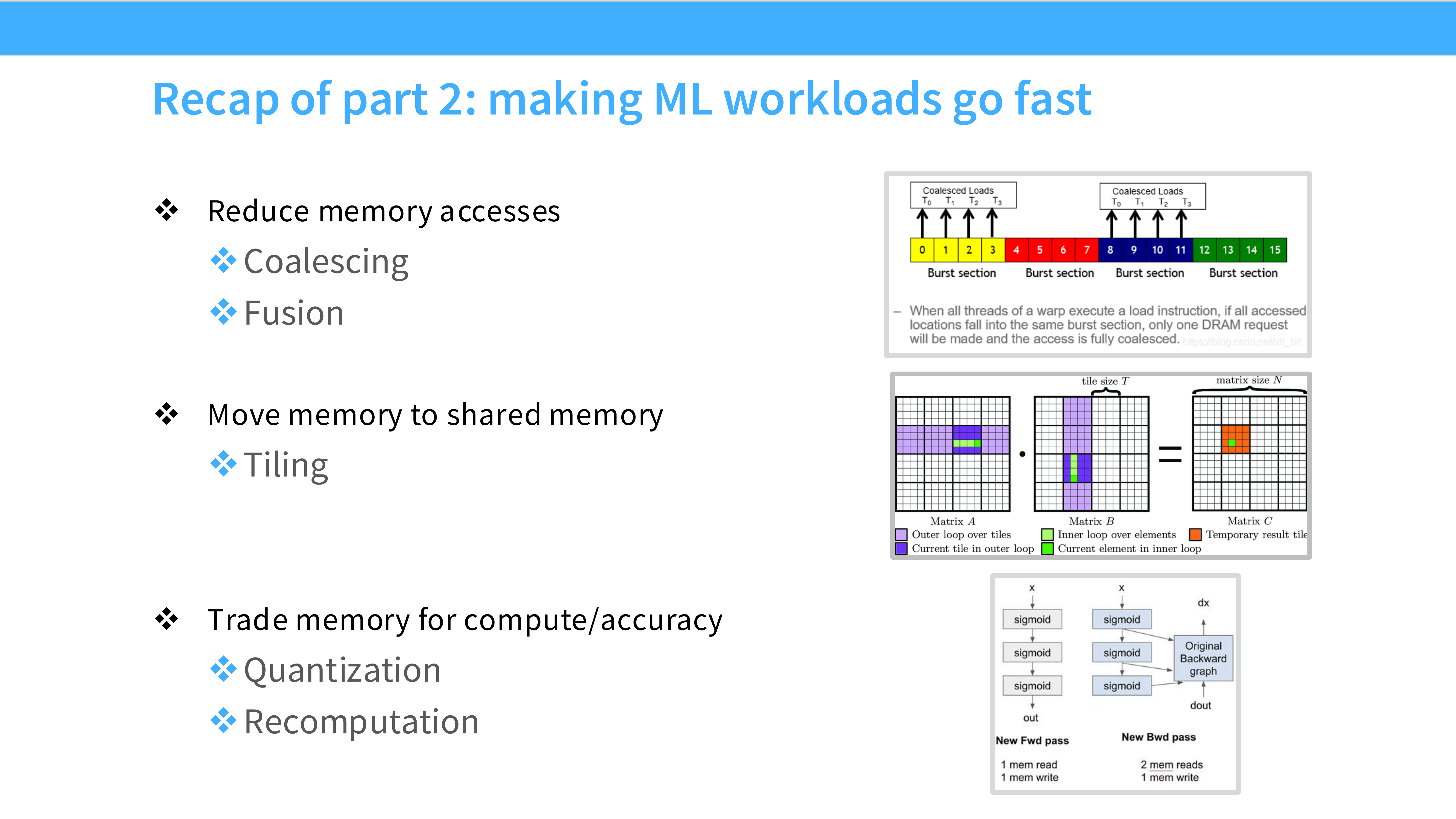
- 内容解析: 让 ML 负载变快的三个关键:
- Reduce memory access: 通过 Coalescing 和 Fusion。
- Shared memory: 通过 Tiling 复用数据。
- Compute trade-offs: 低精度、重计算。
Part 3: 实战案例 - FlashAttention (Putting it all together)
Page 37: Part 3 标题
- 内容解析: 这一部分将前面的理论知识综合运用,解构 FlashAttention。这是一个完美的案例,展示了如何通过硬件感知(IO-aware)的算法设计来突破性能瓶颈。
Page 38: Attention 计算回顾
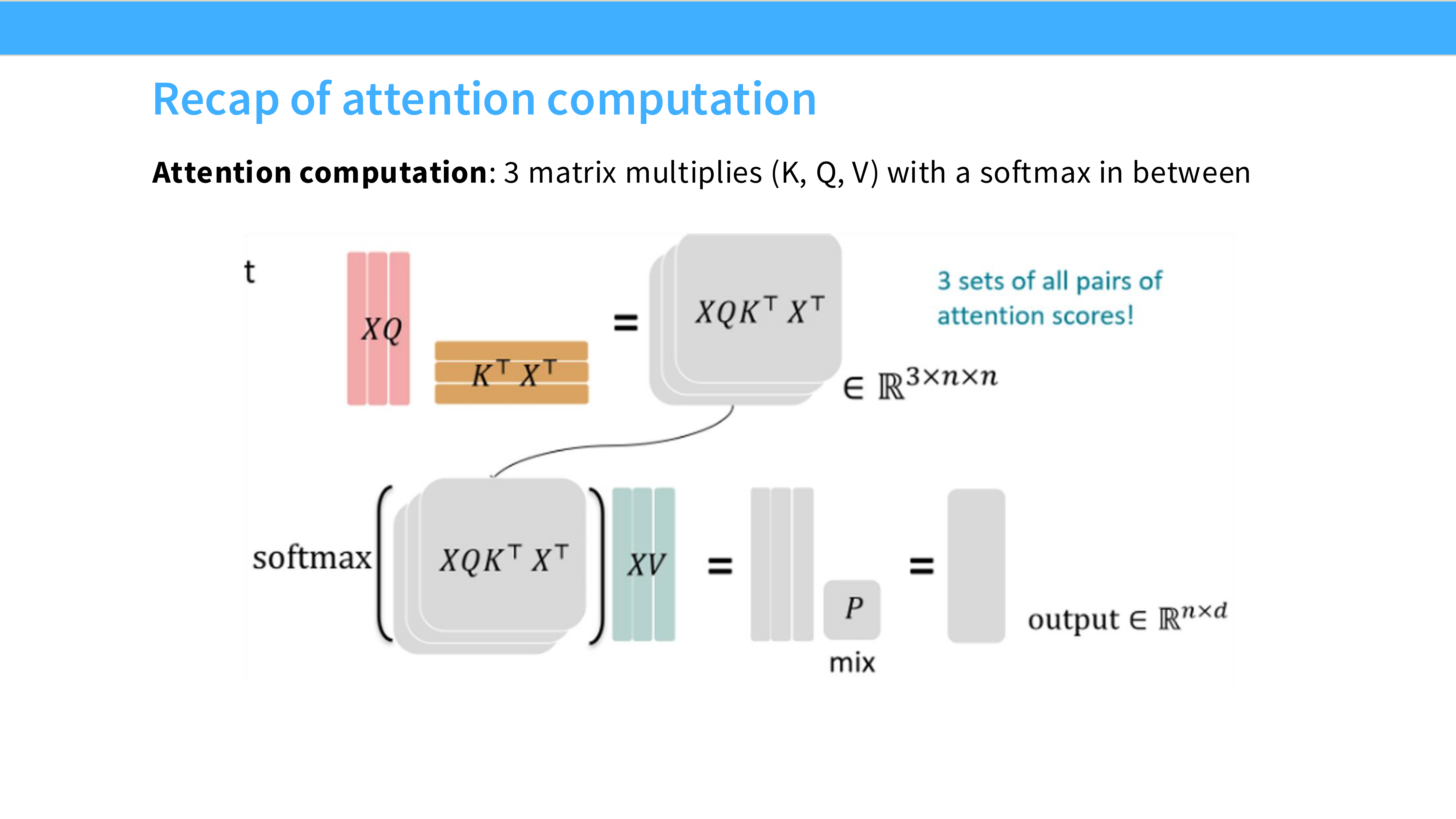
- 内容解析:
- 公式: $Attention(Q, K, V) = Softmax(QK^T)V$。
- 流程: 包含三个矩阵乘法。中间会生成一个 $N \times N$ 的矩阵(Attention Scores)。
- 痛点: $N \times N$ 矩阵读写量巨大,且显存占用是平方级 $O(N^2)$。这导致长序列训练极其缓慢且显存不足。
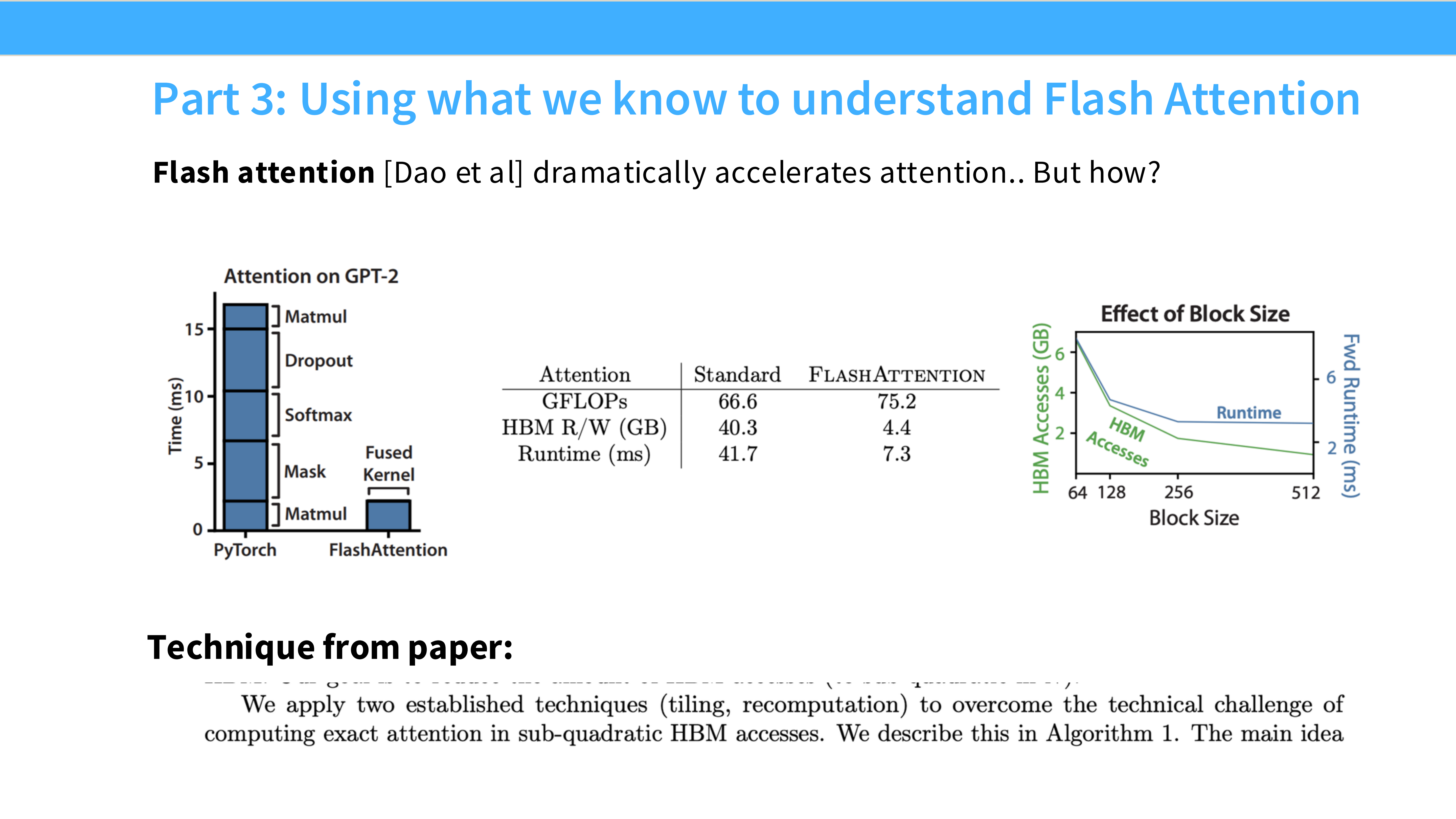
Page 39: FlashAttention 的效果
- 内容解析:
- Runtime (左图): 随着 Block Size 增加,FlashAttention 速度显著快于标准 Attention。
- Memory (右图): 显存占用从平方级降低到了线性级。
- 核心思想: Tiling (分块) + **Recomputation (重计算)**。避免物化(Materialize)巨大的 $N \times N$ 矩阵。
Page 40: Tiling Part 1 - 矩阵乘法
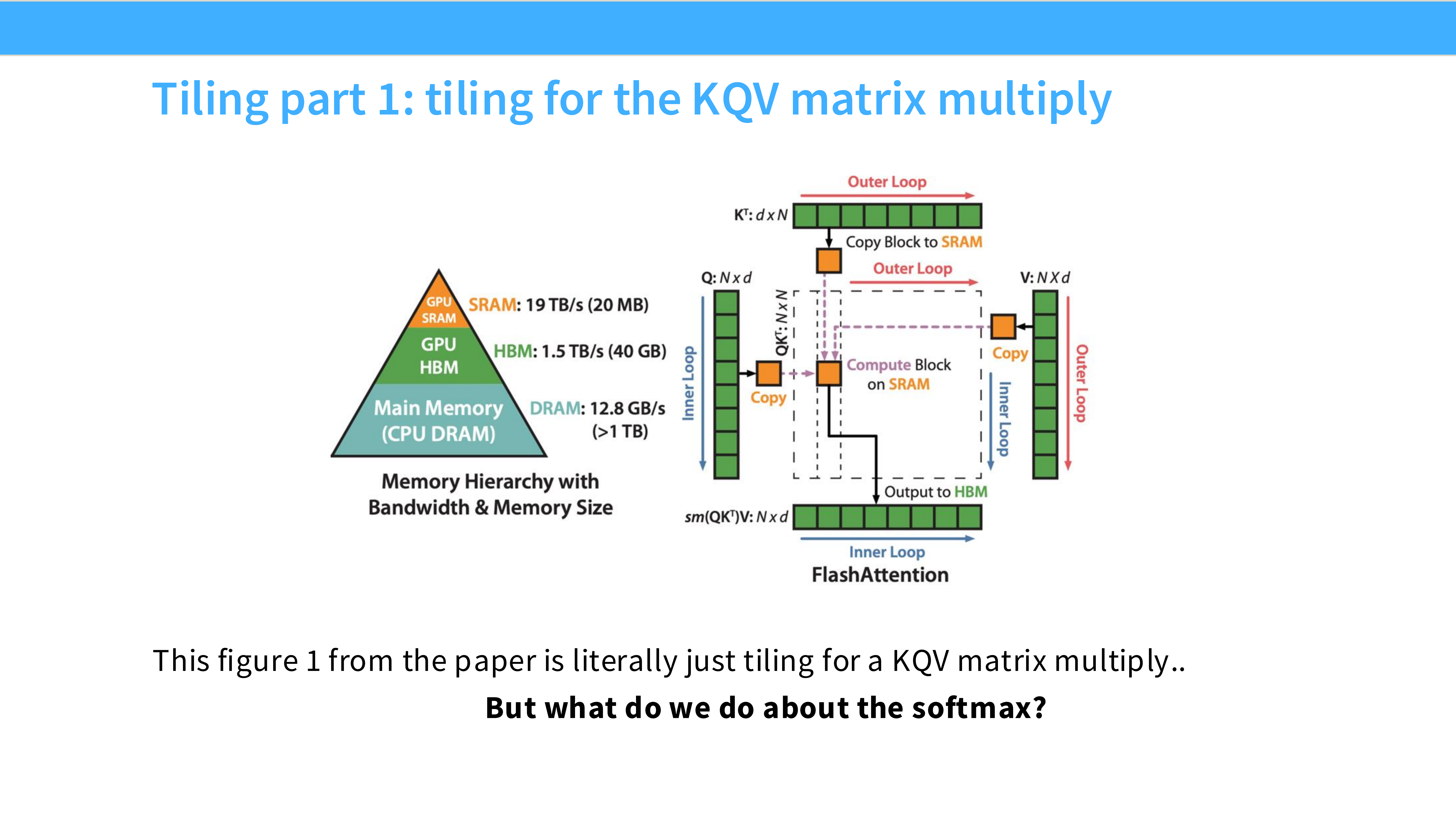
- 内容解析:
- 这部分利用了标准的 Tiling 技巧。将 $Q, K, V$ 矩阵切分成小块。
- 将小块加载到 SRAM,计算局部的 $Q \times K^T$。这部分比较直观。
Page 41: Tiling Part 2 - Softmax 的难题
- 内容解析:
- 挑战: Softmax 是一个全局操作,需要一整行的 Max 和 Sum 才能进行归一化。
- 困境: 如果我们把矩阵切块了,在计算当前块时,无法预知后续块的数值,因此无法知道全局最大值,也就无法直接计算 Softmax。
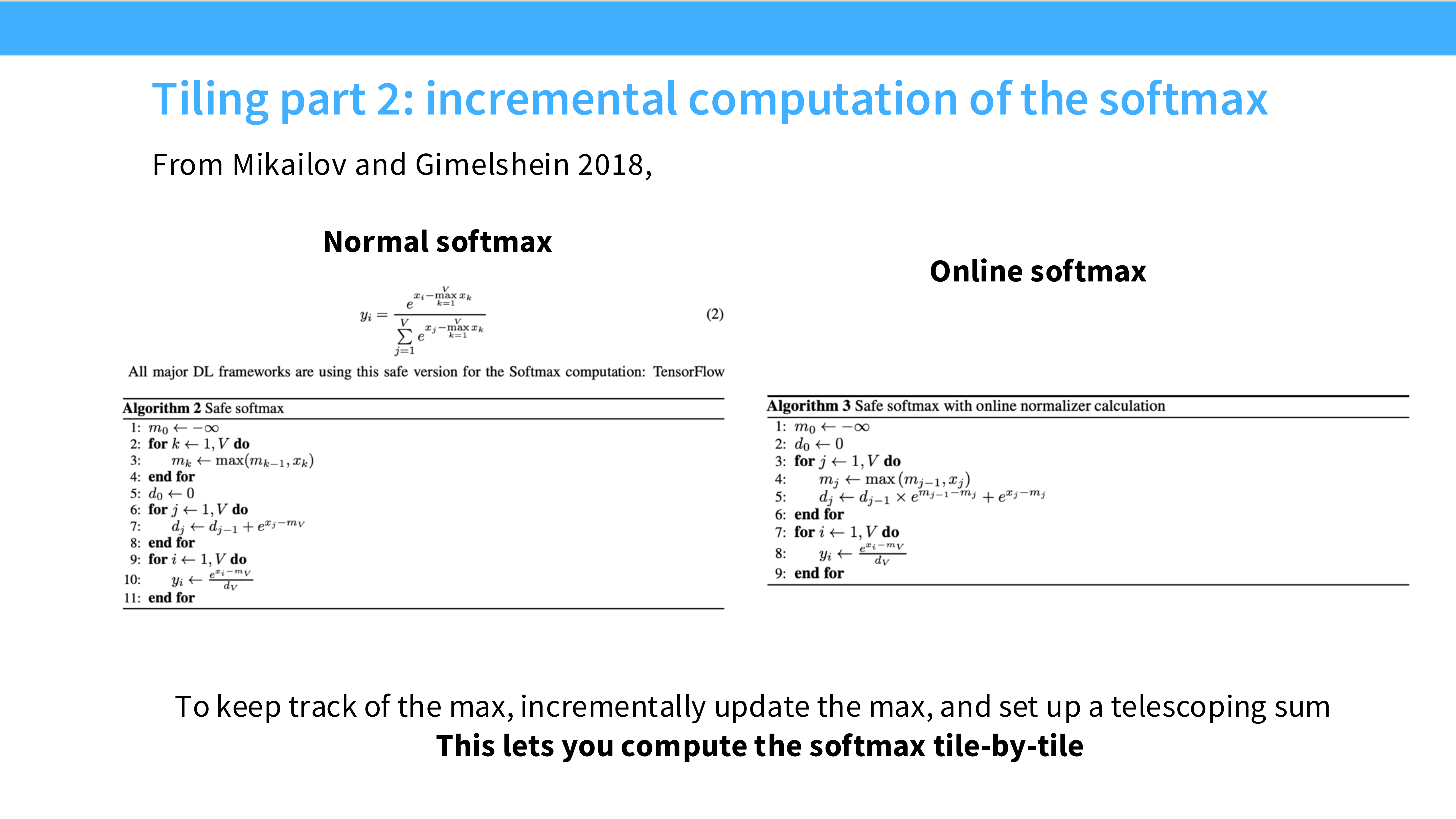
Page 42: 在线 Softmax (Online Softmax)
- 内容解析:
- 这是 FlashAttention 的算法创新。引用了 Mikailov 2018 的论文。
- 技巧: **Telescoping Sum Trick (伸缩和)**。
- 原理: 维护局部的 max 和 sum。当处理下一个块时,利用数学公式更新全局统计量,并动态修正之前计算出的结果。
- 意义: 这使得 Softmax 可以 Tile-by-tile 计算,无需一次性生成整个大矩阵。
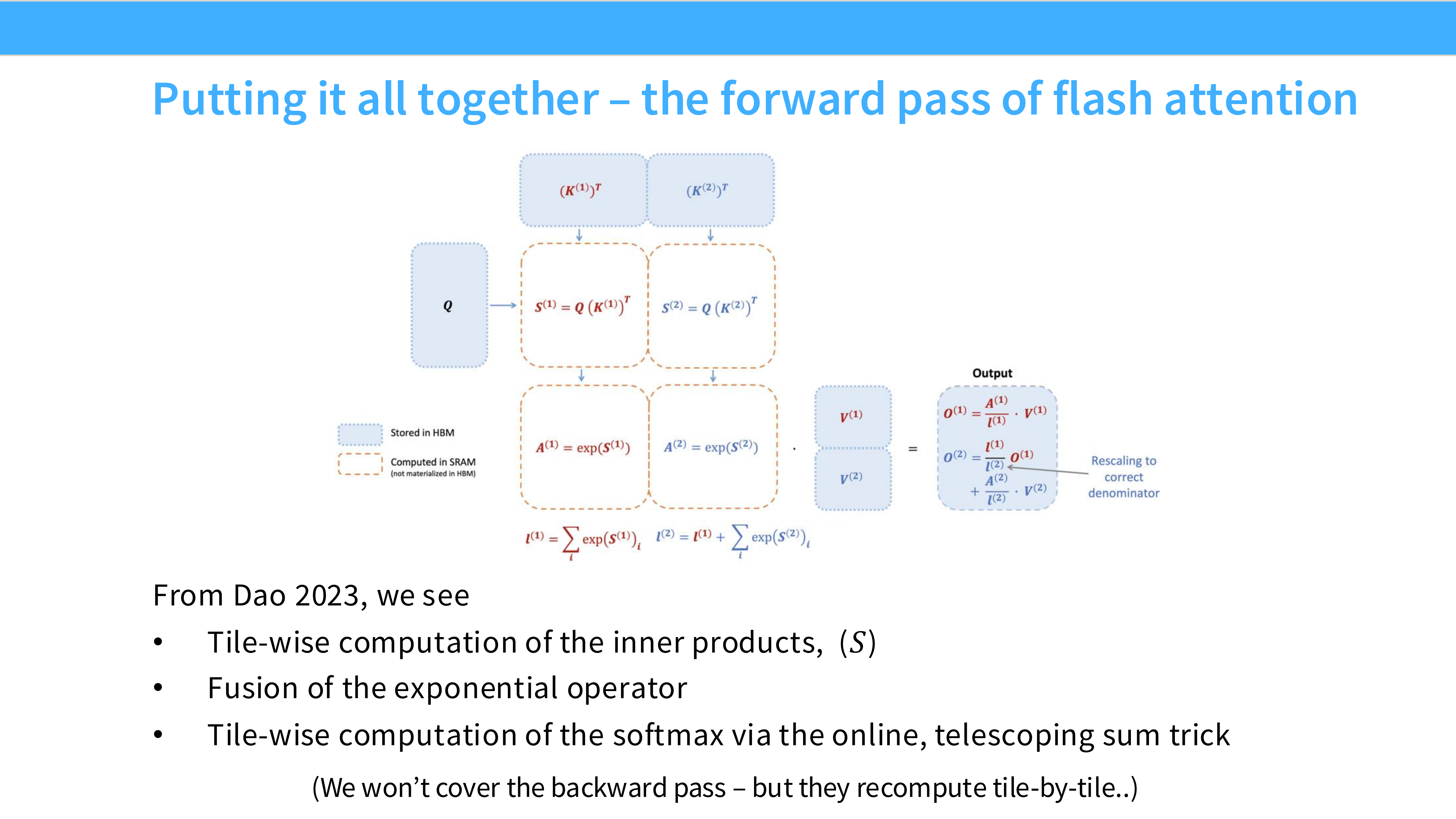
Page 43: 完整的 FlashAttention 前向传播
- 内容解析: 这是 FlashAttention 的核心流程图。
- Outer Loop: 遍历 $K, V$ 的块。
- Inner Loop: 遍历 $Q$ 的块。
- SRAM 计算: 在 SRAM 中计算 $S = QK^T$,更新 Online Softmax 统计量,计算 $O = SV$。
- Output: 将结果写回 HBM。
- 关键: 巨大的 Attention 矩阵从未在 HBM 中完整存在过,全程在 SRAM 中流转并被丢弃。
Page 44: 课程总结 (Recap of Attention)
- 内容解析:
- 回顾了 Attention 计算的三个矩阵乘法和中间的 Softmax。
- 强调了 $N \times N$ 矩阵带来的 IO 瓶颈。
Page 45: IO 复杂度分析 (IO Complexity)
- 内容解析:
- 标准 Attention: IO 复杂度是 $O(N^2)$。
- FlashAttention: 通过 Tiling,IO 复杂度降低到了 $O(N^2 / \sqrt{M})$,其中 $M$ 是 SRAM 的大小。
- 结论: 这证明了 FlashAttention 不仅仅是工程优化,在算法理论上也是 IO 最优的。
Page 46: 反向传播 (Backward Pass)
- 内容解析:
- FlashAttention 的反向传播也使用了 重计算 (Recomputation) 技巧。
- 前向传播时不保存 Attention 矩阵。
- 反向传播时,利用保存的 $Q, K, V$ 和 Output,在 SRAM 中快速重新计算出 Attention 矩阵,用于梯度计算。
- 虽然多算了,但省去了巨大的 HBM 写/读开销,总体速度更快。
Page 47: FlashAttention 2
- 内容解析:
- 提到了后续版本 FlashAttention-2。
- 进一步优化了并行策略(从并行化 Batch 变为并行化 Sequence),减少了非 MatMul 操作的开销,使得性能更接近硬件极限。
Page 48: 广泛应用
- 内容解析:
- FlashAttention 已经成为所有现代 LLM 训练框架(PyTorch, MosaicML, DeepSpeed)的标配。
- 它使得长上下文(Long Context)模型成为可能。
Page 49: Recap Part 1 (GPUs in Depth)
- 内容解析:
- GPU 是为吞吐量设计的,拥有海量 ALU。
- 内存层级(HBM vs SRAM)是理解性能的关键。
- 执行模型(Grid/Block/Warp)决定了代码的组织方式。
Page 50: Recap Part 2 (Performance Optimization)
- 内容解析:
- Roofline Model: 区分 Compute Bound 和 Memory Bound。
- Optimization Tricks:
- Tiling: 利用 SRAM 复用数据。
- Coalescing: 对齐内存访问。
- Fusion: 减少 HBM 访问。
- Tensor Cores: 加速矩阵计算。
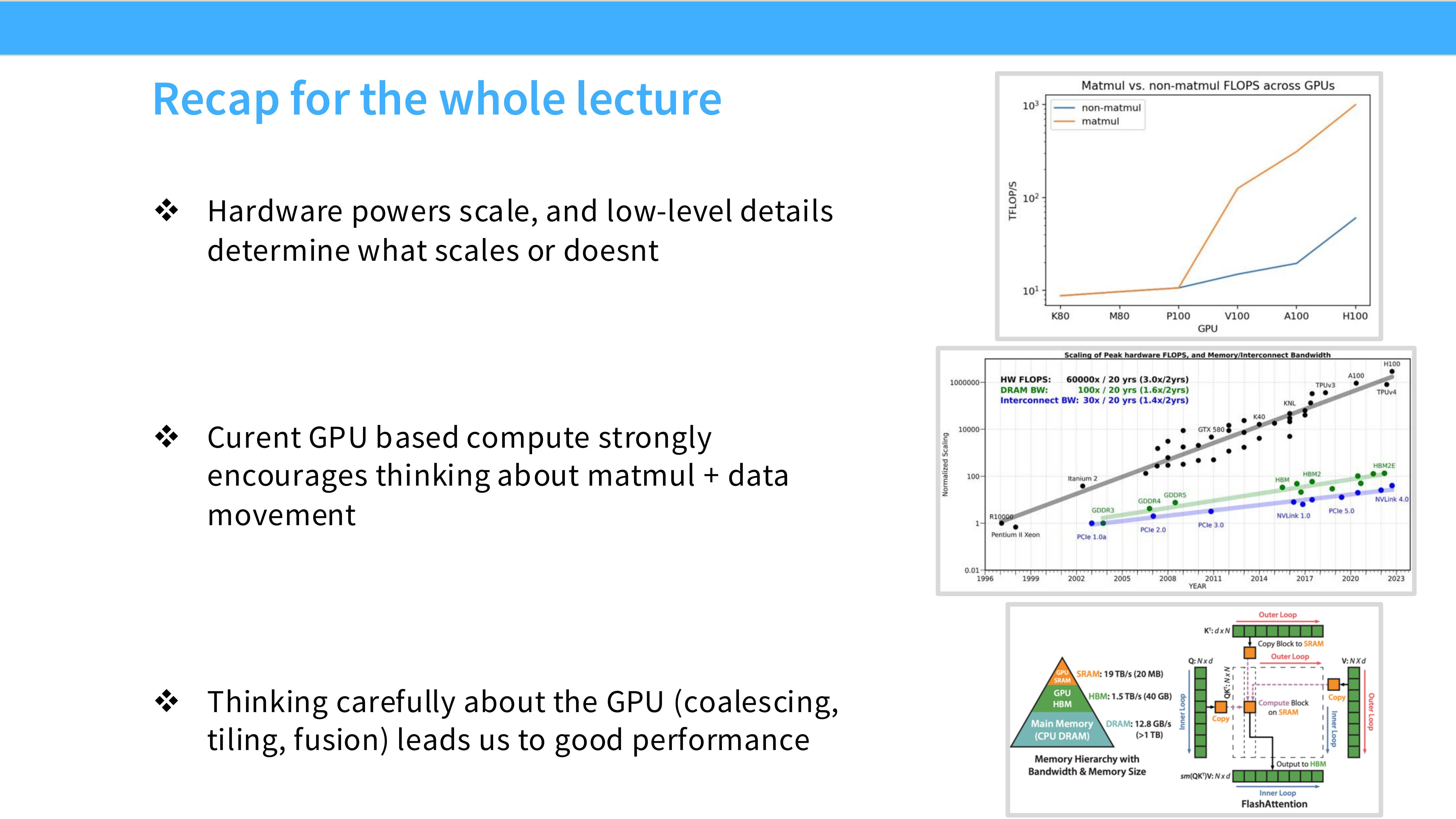
Page 51: 全课总结 (Recap for the whole lecture)
- 内容解析:
- Hardware: 硬件算力和底层细节(SRAM 带宽)决定了扩展的上限。
- Performance: 当前 GPU 编程的核心在于思考 MatMul + Data Movement。显存带宽通常是最大的瓶颈。
- Tricks: 仔细思考 GPU 特性 —— Coalescing, Tiling, Fusion —— 能带来巨大的性能提升。FlashAttention 就是这些原则的集大成者,它通过算法创新将一个 Memory Bound 的问题转化为了 Compute Bound 的问题。
大模型从0到1|第五讲:详解 GPU 架构与性能优化
https://realwujing.github.io/linux/drivers/gpu/stanford-cs336/大模型从0到1|第五讲:详解 GPU 架构与性能优化/