本文最后更新于:2025年11月23日 晚上
大模型从0到1|第二讲:PyTorch手把手搭建LLM
课程链接:Stanford CS336 Spring 2025 - Lecture 2
课程概述
上节课回顾: 课程概述、Tokenization
本讲概览:
- 讨论训练模型所需的所有原语(primitives)
- 自底向上:从张量 → 模型 → 优化器 → 训练循环
- 密切关注效率(资源使用)
两类资源:
- 内存(Memory) - GB
- 计算(Compute) - FLOPs
动机问题
让我们做一些粗略计算:
问题 1:训练时间估算
问题: 在 1024 个 H100 上训练 70B 参数模型,使用 15T token,需要多长时间?
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
total_flops = 6 * 70e9 * 15e12
h100_flop_per_sec = 1979e12 / 2
mfu = 0.5
flops_per_day = h100_flop_per_sec * mfu * 1024 * 60 * 60 * 24
days = total_flops / flops_per_day
|
问题 2:内存容量估算
问题: 使用 AdamW 在 8 个 H100 上能训练多大的模型?
1
2
3
4
5
6
7
8
9
10
11
12
|
h100_bytes = 80e9
bytes_per_parameter = 4 + 4 + (4 + 4)
num_parameters = (h100_bytes * 8) / bytes_per_parameter
|
注意事项:
- 可以使用 bf16 存储参数和梯度(2+2),保留 float32 副本(4),不节省内存但更快
- 激活(activations)未计入(取决于批大小和序列长度)
这只是粗略的估算!
Part 1: 内存核算
1.1 张量基础
张量: 存储一切的基本构建块
- 参数(Parameters)
- 梯度(Gradients)
- 优化器状态(Optimizer State)
- 数据(Data)
- 激活(Activations)
文档: PyTorch Tensors
创建张量
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
x = torch.tensor([[1., 2, 3], [4, 5, 6]])
x = torch.zeros(4, 8)
x = torch.ones(4, 8)
x = torch.randn(4, 8)
x = torch.empty(4, 8)
nn.init.trunc_normal_(x, mean=0, std=1, a=-2, b=2)
|
1.2 浮点数类型
几乎所有内容(参数、梯度、激活、优化器状态)都存储为浮点数。
float32(单精度)

特点:
- 默认数据类型
- 1 位符号 + 8 位指数 + 23 位尾数
- 每个值 4 字节
示例:
1
2
3
4
5
| x = torch.zeros(4, 8)
assert x.dtype == torch.float32
assert x.numel() == 32
assert x.element_size() == 4
assert x.numel() * x.element_size() == 128
|
GPT-3 的一个前馈层矩阵:
1
2
|
torch.empty(12288 * 4, 12288).numel() * 4 / (1024**3)
|
这太多了!
float16(半精度)
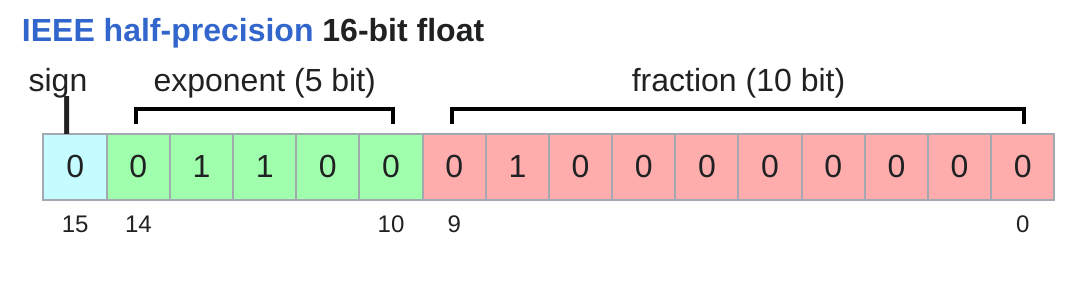
特点:
- 1 位符号 + 5 位指数 + 10 位尾数
- 每个值 2 字节
- 内存减半
问题:动态范围不足
1
2
| x = torch.tensor([1e-8], dtype=torch.float16)
assert x == 0
|
训练时可能导致不稳定。
bfloat16(Brain Float)
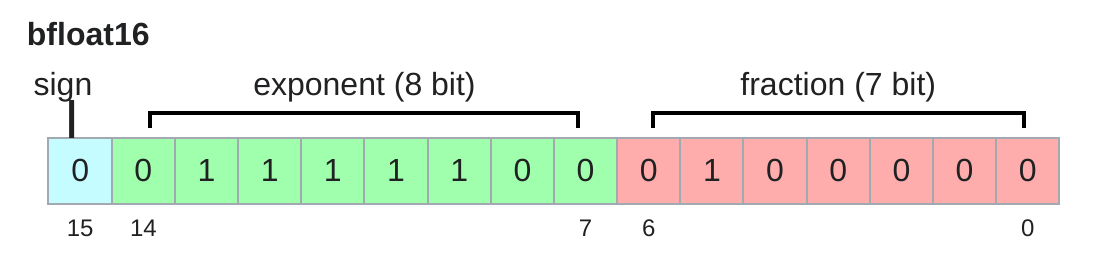
特点:
- Google Brain 2018 年开发
- 1 位符号 + 8 位指数 + 7 位尾数
- 与 float16 相同内存(2 字节)
- 与 float32 相同动态范围!
- 只是精度较低(但深度学习不太在意)
1
2
| x = torch.tensor([1e-8], dtype=torch.bfloat16)
assert x != 0
|
对比:
1
2
3
4
5
6
7
8
| float32_info = torch.finfo(torch.float32)
float16_info = torch.finfo(torch.float16)
bfloat16_info = torch.finfo(torch.bfloat16)
|
FP8
2022 年标准化,专为机器学习设计
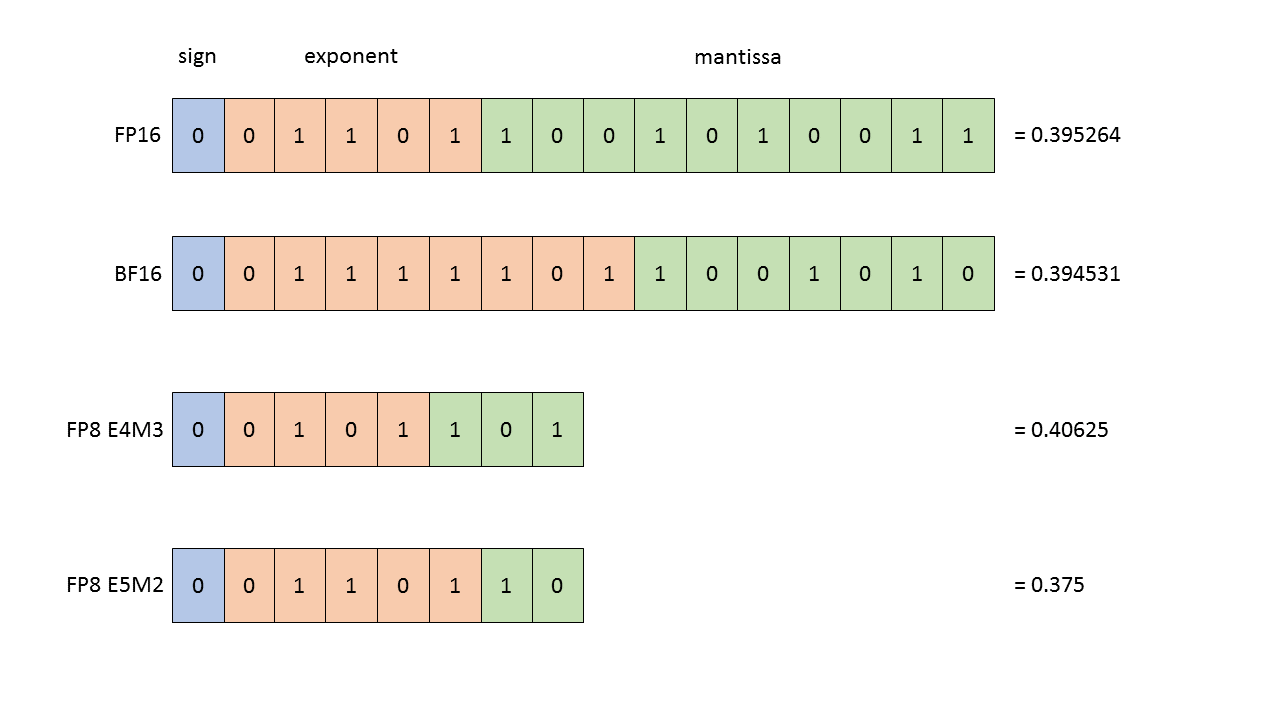
H100 支持两种 FP8 变体:
- E4M3: 范围 [-448, 448]
- E5M2: 范围 [-57344, 57344]
参考: FP8 Formats for Deep Learning
训练的影响
问题:
- float32 训练可行,但需要大量内存
- fp8、float16 甚至 bfloat16 训练有风险,可能不稳定
解决方案: 混合精度训练(稍后讨论)
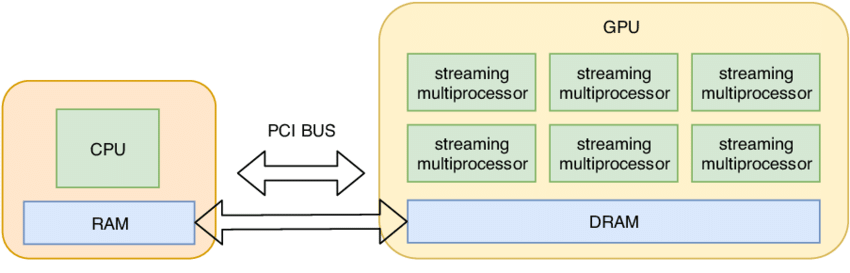
1.3 GPU 上的张量
默认: 张量存储在 CPU 内存中
1
2
| x = torch.zeros(32, 32)
assert x.device == torch.device("cpu")
|
GPU 加速: 需要将张量移动到 GPU 内存
检查 GPU
1
2
3
4
5
6
7
8
9
10
11
12
13
|
torch.cuda.is_available()
num_gpus = torch.cuda.device_count()
for i in range(num_gpus):
properties = torch.cuda.get_device_properties(i)
memory_allocated = torch.cuda.memory_allocated()
|
移动到 GPU
1
2
3
4
5
6
7
8
9
10
11
12
|
x = torch.zeros(32, 32)
y = x.to("cuda:0")
assert y.device == torch.device("cuda", 0)
z = torch.zeros(32, 32, device="cuda:0")
new_memory = torch.cuda.memory_allocated()
memory_used = new_memory - memory_allocated
assert memory_used == 2 * (32 * 32 * 4)
|
1.4 张量存储机制
PyTorch 张量 = 指向内存的指针 + 元数据
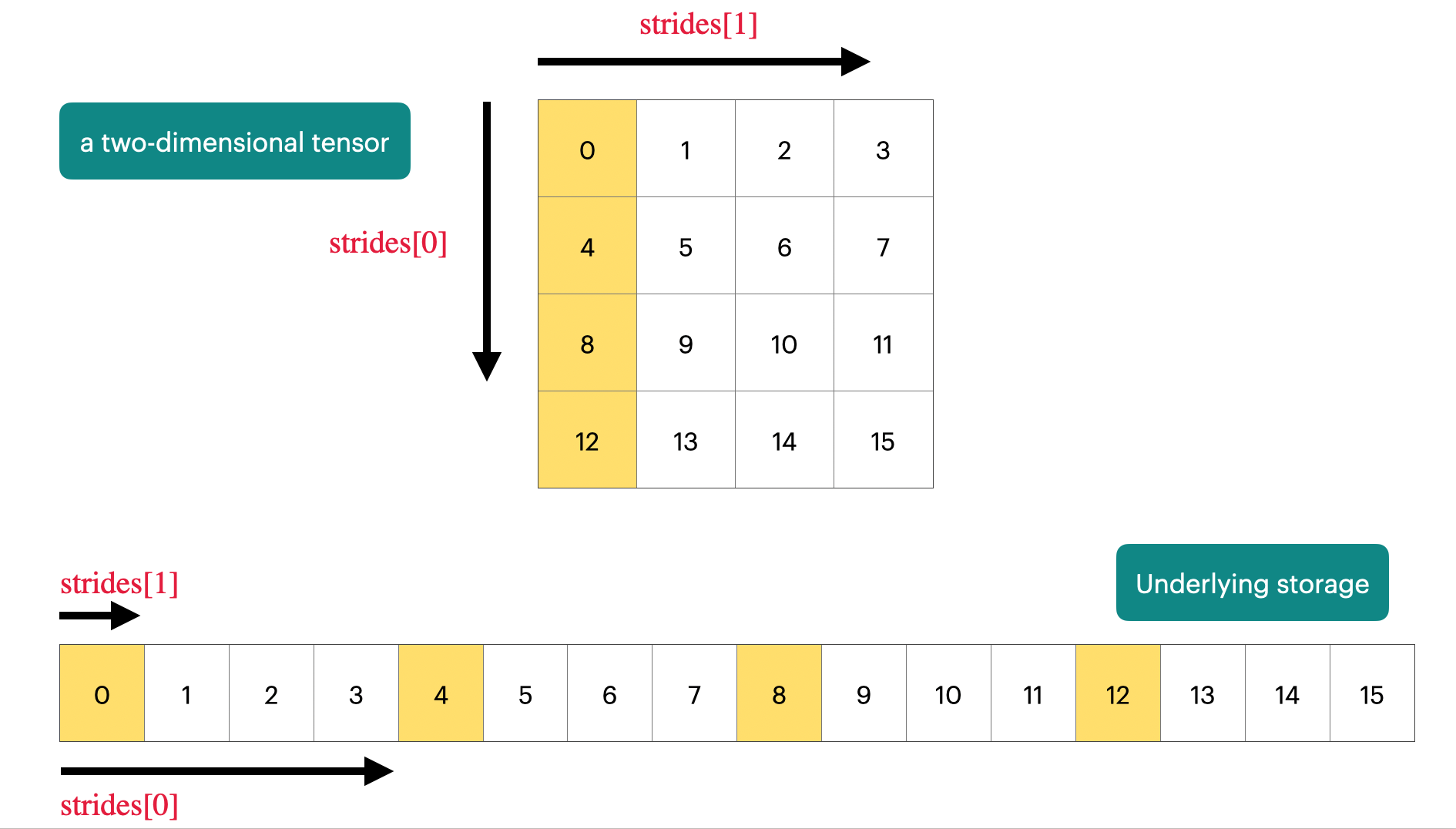
Stride(步长): 描述如何访问任何元素
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| x = torch.tensor([
[0., 1, 2, 3],
[4, 5, 6, 7],
[8, 9, 10, 11],
[12, 13, 14, 15],
])
assert x.stride(0) == 4
assert x.stride(1) == 1
r, c = 1, 2
index = r * x.stride(0) + c * x.stride(1)
assert x.storage()[index] == 6.0
|
1.5 张量视图(Views)
许多操作只是提供张量的不同视图,不复制数据。
切片
1
2
3
4
5
6
7
8
9
| x = torch.tensor([[1., 2, 3], [4, 5, 6]])
y = x[0]
assert same_storage(x, y)
y = x[:, 1]
assert same_storage(x, y)
|
重塑
1
2
3
4
5
6
7
|
y = x.view(3, 2)
assert same_storage(x, y)
y = x.transpose(1, 0)
assert same_storage(x, y)
|
突变共享
1
2
3
| x[0][0] = 100
assert y[0][0] == 100
|
连续性(Contiguity)
某些视图是非连续的,无法进一步视图化:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| x = torch.tensor([[1., 2, 3], [4, 5, 6]])
y = x.transpose(1, 0)
assert not y.is_contiguous()
try:
y.view(2, 3)
except RuntimeError:
pass
y = x.transpose(1, 0).contiguous().view(2, 3)
assert not same_storage(x, y)
|
权衡:
- 视图:免费,无额外内存/计算
- 复制:需要额外内存和计算
Part 2: 计算核算
2.1 张量操作
大多数张量是通过对其他张量执行操作创建的。
每个操作都有内存和计算后果。
逐元素操作
对张量的每个元素应用操作,返回相同形状的张量:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| x = torch.tensor([1, 4, 9])
x.pow(2)
x.sqrt()
x.rsqrt()
x + x
x * 2
x / 0.5
|
上三角矩阵:
1
2
3
4
| x = torch.ones(3, 3).triu()
|
用于计算因果注意力掩码,其中 M[i, j] 是 i 对 j 的贡献。
矩阵乘法
深度学习的核心:
1
2
3
4
| x = torch.ones(16, 32)
w = torch.ones(32, 2)
y = x @ w
assert y.size() == torch.Size([16, 2])
|
批处理和序列:
1
2
3
4
5
|
x = torch.ones(4, 8, 16, 32)
w = torch.ones(32, 2)
y = x @ w
assert y.size() == torch.Size([4, 8, 16, 2])
|
迭代前两个维度,每个与 w 相乘。
2.2 Einops:优雅的张量操作
动机: 传统 PyTorch 代码容易出错
1
2
3
4
|
x = torch.ones(2, 2, 3)
y = torch.ones(2, 2, 3)
z = x @ y.transpose(-2, -1)
|
Einops: 受 Einstein 求和记号启发(1916)
Einops Tutorial
JaxTyping:维度标注
旧方式:
1
| x = torch.ones(2, 2, 1, 3)
|
新方式(JaxTyping):
1
2
3
| from jaxtyping import Float
x: Float[torch.Tensor, "batch seq heads hidden"] = torch.ones(2, 2, 1, 3)
|
注意:这只是文档(无强制执行)
Einsum:广义矩阵乘法
1
2
3
4
5
6
7
8
9
10
| from einops import einsum
x: Float[torch.Tensor, "batch seq1 hidden"] = torch.ones(2, 3, 4)
y: Float[torch.Tensor, "batch seq2 hidden"] = torch.ones(2, 3, 4)
z = x @ y.transpose(-2, -1)
z = einsum(x, y, "batch seq1 hidden, batch seq2 hidden -> batch seq1 seq2")
|
规则: 输出中未命名的维度会被求和。
广播: 使用 ... 表示任意数量的维度
1
| z = einsum(x, y, "... seq1 hidden, ... seq2 hidden -> ... seq1 seq2")
|
Reduce:归约操作
1
2
3
4
5
6
7
8
9
10
| from einops import reduce
x: Float[torch.Tensor, "batch seq hidden"] = torch.ones(2, 3, 4)
y = x.mean(dim=-1)
y = reduce(x, "... hidden -> ...", "mean")
|
Rearrange:重塑维度
有时一个维度代表两个维度,你想单独操作其中一个。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| from einops import rearrange
x: Float[torch.Tensor, "batch seq total_hidden"] = torch.ones(2, 3, 8)
w: Float[torch.Tensor, "hidden1 hidden2"] = torch.ones(4, 4)
x = rearrange(x, "... (heads hidden1) -> ... heads hidden1", heads=2)
x = einsum(x, w, "... hidden1, hidden1 hidden2 -> ... hidden2")
x = rearrange(x, "... heads hidden2 -> ... (heads hidden2)")
|
2.3 FLOPs 计算
FLOP(浮点运算): 基本操作如加法(x + y)或乘法(x * y)
两个容易混淆的缩写:
- FLOPs: 浮点运算数量(计算量的度量)
- FLOP/s(或 FLOPS): 每秒浮点运算数(硬件速度的度量)
直觉
训练成本:
- GPT-3 (2020):3.14e23 FLOPs
- GPT-4 (2023):推测 2e25 FLOPs
- 美国行政命令(2025 年撤销):≥1e26 FLOPs 的模型必须向政府报告
硬件性能:
- A100:312 TFLOP/s(峰值)
- H100:1979 TFLOP/s(带稀疏性),989.5 TFLOP/s(无稀疏性)
8 个 H100 运行 2 周:
1
2
| total_flops = 8 * (60 * 60 * 24 * 14) * 989.5e12
|
线性模型示例
1
2
3
4
5
6
7
| B = 16384
D = 32768
K = 8192
x = torch.ones(B, D, device="cuda")
w = torch.randn(D, K, device="cuda")
y = x @ w
|
FLOPs 计算:
- 每个 (i, j, k) 三元组:1 次乘法 + 1 次加法
- 总 FLOPs = 2 * B * D * K
1
2
| actual_num_flops = 2 * 16384 * 32768 * 8192
|
其他操作的 FLOPs
- 逐元素操作: O(m * n) FLOPs(m×n 矩阵)
- 矩阵加法: m * n FLOPs
关键洞察: 对于足够大的矩阵,没有其他操作比矩阵乘法更昂贵。
训练的 FLOPs
解释:
- B = token 数量
- (D * K) = 参数数量
- 前向传播 FLOPs = 2 × token 数 × 参数数
这推广到 Transformer(一阶近似)!
实际性能测试
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| import time
def time_matmul(x, w):
for _ in range(10):
_ = x @ w
torch.cuda.synchronize()
start = time.time()
for _ in range(100):
_ = x @ w
torch.cuda.synchronize()
end = time.time()
return (end - start) / 100
actual_time = time_matmul(x, w)
actual_flop_per_sec = actual_num_flops / actual_time
|
模型 FLOPs 利用率(MFU)
定义: MFU = 实际 FLOP/s / 承诺 FLOP/s
1
2
3
| promised_flop_per_sec = 989.5e12
mfu = actual_flop_per_sec / promised_flop_per_sec
|
通常 MFU ≥ 0.5 就很好了(如果矩阵乘法占主导会更高)
bfloat16 性能
1
2
3
4
5
6
7
| x = x.to(torch.bfloat16)
w = w.to(torch.bfloat16)
bf16_actual_time = time_matmul(x, w)
bf16_actual_flop_per_sec = actual_num_flops / bf16_actual_time
bf16_promised_flop_per_sec = 1979e12
bf16_mfu = bf16_actual_flop_per_sec / bf16_promised_flop_per_sec
|
观察:
- bfloat16 的实际 FLOP/s 更高
- MFU 可能较低(承诺的 FLOPs 有点乐观)
2.4 梯度计算
基础示例
简单线性模型:y = 0.5 * (x * w - 5)²
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
x = torch.tensor([1., 2, 3])
w = torch.tensor([1., 1, 1], requires_grad=True)
pred_y = x @ w
loss = 0.5 * (pred_y - 5).pow(2)
loss.backward()
assert loss.grad is None
assert pred_y.grad is None
assert x.grad is None
assert torch.equal(w.grad, torch.tensor([1, 2, 3]))
|
梯度的 FLOPs
模型: x –w1–> h1 –w2–> h2 -> loss
1
2
3
4
5
6
7
8
9
10
11
| B = 16384
D = 32768
K = 8192
x = torch.ones(B, D, device="cuda")
w1 = torch.randn(D, D, device="cuda", requires_grad=True)
w2 = torch.randn(D, K, device="cuda", requires_grad=True)
h1 = x @ w1
h2 = h1 @ w2
loss = h2.pow(2).mean()
|
前向 FLOPs:
1
| num_forward_flops = (2 * B * D * D) + (2 * B * D * K)
|
反向传播:
1
2
3
| h1.retain_grad()
h2.retain_grad()
loss.backward()
|
计算 w2.grad:
1
| w2.grad = sum_i h1 * h2.grad
|
计算 h1.grad:
1
| h1.grad = sum_k w2 * h2.grad
|
w1 同理:
- FLOPs = (2 + 2) * B * D * D
总反向 FLOPs:
1
| num_backward_flops = 4 * B * D * D + 4 * B * D * K
|
可视化

Blog Post: FLOPs Calculus
总结
训练一步的 FLOPs:
- 前向传播:2 × token 数 × 参数数
- 反向传播:4 × token 数 × 参数数
- 总计:6 × token 数 × 参数数
Part 3: 模型
3.1 参数
模型参数在 PyTorch 中存储为 nn.Parameter 对象。
1
2
3
4
5
6
| input_dim = 16384
output_dim = 32
w = nn.Parameter(torch.randn(input_dim, output_dim))
assert isinstance(w, torch.Tensor)
assert type(w.data) == torch.Tensor
|
3.2 参数初始化
问题: 未缩放的初始化
1
2
3
4
5
| x = nn.Parameter(torch.randn(input_dim))
output = x @ w
|
解决方案: 缩放使其与 input_dim 无关
1
2
3
| w = nn.Parameter(torch.randn(input_dim, output_dim) / np.sqrt(input_dim))
output = x @ w
|
Xavier 初始化:
- Paper
- 截断正态分布到 [-3, 3] 以避免异常值
1
2
3
4
5
6
7
| w = nn.Parameter(
nn.init.trunc_normal_(
torch.empty(input_dim, output_dim),
std=1 / np.sqrt(input_dim),
a=-3, b=3
)
)
|
3.3 自定义模型
简单线性层
1
2
3
4
5
6
7
8
9
| class Linear(nn.Module):
def __init__(self, input_dim: int, output_dim: int):
super().__init__()
self.weight = nn.Parameter(
torch.randn(input_dim, output_dim) / np.sqrt(input_dim)
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
return x @ self.weight
|
深度线性模型
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| class Cruncher(nn.Module):
def __init__(self, dim: int, num_layers: int):
super().__init__()
self.layers = nn.ModuleList([
Linear(dim, dim)
for i in range(num_layers)
])
self.final = Linear(dim, 1)
def forward(self, x: torch.Tensor) -> torch.Tensor:
for layer in self.layers:
x = layer(x)
x = self.final(x)
x = x.squeeze(-1)
return x
|
使用模型
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| D = 64
num_layers = 2
model = Cruncher(dim=D, num_layers=num_layers)
param_sizes = [
(name, param.numel())
for name, param in model.state_dict().items()
]
num_parameters = sum(p.numel() for p in model.parameters())
device = "cuda" if torch.cuda.is_available() else "cpu"
model = model.to(device)
B = 8
x = torch.randn(B, D, device=device)
y = model(x)
assert y.size() == torch.Size([B])
|
Part 4: 训练循环
4.1 随机性注意事项
随机性出现在许多地方:
为了可重现性,始终设置随机种子:
1
2
3
4
5
6
7
8
9
10
11
12
| seed = 0
torch.manual_seed(seed)
import numpy as np
np.random.seed(seed)
import random
random.seed(seed)
|
确定性对调试特别有用!
4.2 数据加载
语言建模数据: 整数序列(tokenizer 输出)
序列化为 NumPy 数组:
1
2
3
4
5
6
7
8
|
data = np.array([1, 2, 3, 4, 5, 6, 7, 8, 9, 10], dtype=np.int32)
data.tofile("data.npy")
data = np.memmap("data.npy", dtype=np.int32)
|
批处理函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| def get_batch(data, batch_size, sequence_length, device):
start_indices = torch.randint(
len(data) - sequence_length,
(batch_size,)
)
x = torch.tensor([
data[start:start + sequence_length]
for start in start_indices
])
if torch.cuda.is_available():
x = x.pin_memory()
x = x.to(device, non_blocking=True)
return x
|
Pinned Memory 优势:
- 允许 CPU → GPU 异步复制
- 可以并行:
- 在 CPU 上获取下一批数据
- 在 GPU 上处理当前批次
4.3 优化器
SGD(随机梯度下降)
1
2
3
4
5
6
7
8
9
10
| class SGD(torch.optim.Optimizer):
def __init__(self, params, lr=0.01):
super().__init__(params, dict(lr=lr))
def step(self):
for group in self.param_groups:
lr = group["lr"]
for p in group["params"]:
grad = p.grad.data
p.data -= lr * grad
|
AdaGrad
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| class AdaGrad(torch.optim.Optimizer):
def __init__(self, params, lr=0.01):
super().__init__(params, dict(lr=lr))
def step(self):
for group in self.param_groups:
lr = group["lr"]
for p in group["params"]:
state = self.state[p]
grad = p.grad.data
g2 = state.get("g2", torch.zeros_like(grad))
g2 += torch.square(grad)
state["g2"] = g2
p.data -= lr * grad / torch.sqrt(g2 + 1e-5)
|
优化器层次
- Momentum = SGD + 梯度的指数平均
- AdaGrad = SGD + 按 grad² 平均
- RMSProp = AdaGrad + grad² 的指数平均
- Adam = RMSProp + Momentum
使用优化器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| model = Cruncher(dim=4, num_layers=2).to(device)
optimizer = AdaGrad(model.parameters(), lr=0.01)
x = torch.randn(2, 4, device=device)
y = torch.tensor([4., 5.], device=device)
pred_y = model(x)
loss = F.mse_loss(pred_y, y)
loss.backward()
optimizer.step()
optimizer.zero_grad(set_to_none=True)
|
4.4 资源核算
内存(float32):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
num_parameters = D*D*num_layers + D
num_activations = B * D * num_layers
num_gradients = num_parameters
num_optimizer_states = num_parameters
total_memory = 4 * (
num_parameters +
num_activations +
num_gradients +
num_optimizer_states
)
|
计算(一步):
1
| flops = 6 * B * num_parameters
|
Transformer 更复杂,但思路相同。
参考:
4.5 训练循环
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| def train(get_batch, D, num_layers, B, num_train_steps, lr):
model = Cruncher(dim=D, num_layers=num_layers).to(device)
optimizer = SGD(model.parameters(), lr=lr)
for t in range(num_train_steps):
x, y = get_batch(B=B)
pred_y = model(x)
loss = F.mse_loss(pred_y, y)
loss.backward()
optimizer.step()
optimizer.zero_grad(set_to_none=True)
|
4.6 检查点(Checkpointing)
训练需要很长时间,肯定会崩溃。不想失去所有进度!
定期保存模型和优化器状态:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| model = Cruncher(dim=64, num_layers=3).to(device)
optimizer = AdaGrad(model.parameters(), lr=0.01)
checkpoint = {
"model": model.state_dict(),
"optimizer": optimizer.state_dict(),
}
torch.save(checkpoint, "model_checkpoint.pt")
loaded_checkpoint = torch.load("model_checkpoint.pt")
model.load_state_dict(loaded_checkpoint["model"])
optimizer.load_state_dict(loaded_checkpoint["optimizer"])
|
4.7 混合精度训练
权衡:
- 高精度:更准确/稳定,更多内存,更多计算
- 低精度:不太准确/稳定,更少内存,更少计算
如何两全其美?
解决方案: 默认使用 float32,但在可能的地方使用 {bfloat16, fp8}
具体计划:
- 前向传播使用 {bfloat16, fp8}(激活)
- 其余使用 float32(参数、梯度)
参考:
NVIDIA Transformer Engine:
- 支持线性层的 FP8
- 在整个训练中普遍使用 FP8
总结
知识类型
机制(Mechanics): 直接(只是 PyTorch)
思维方式(Mindset): 资源核算(记得做)
- 内存:参数 + 激活 + 梯度 + 优化器状态
- 计算:6 × token 数 × 参数数
直觉(Intuitions): 大致方向(没有大模型)
关键要点
张量是一切的基础
资源核算至关重要
- 内存:每个参数 16 字节(AdamW)
- 计算:6 × tokens × params FLOPs
效率驱动设计
下节课预告
主题: Transformer 架构细节
参考资源
PyTorch 文档:
Einops:
博客文章:
论文: